Космическая
робототехника:
Опыт и перспективы развития
АННОТАЦИЯ
I
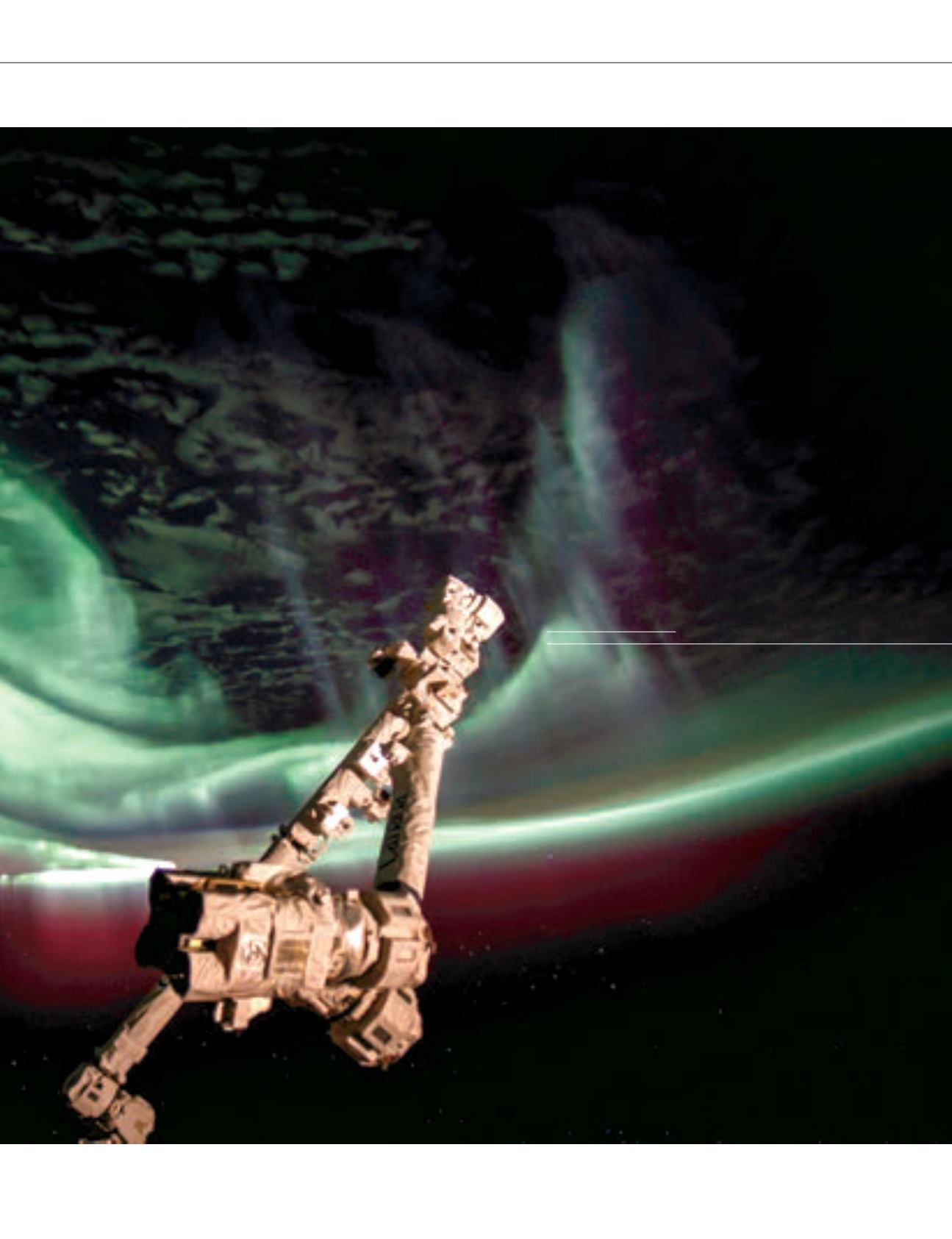
В статье проанализирована
логика развития космической робототехники.
Обобщен многолетний опыт орбитальной
эксплуатации уникальных объектов –
манипуляторов Canadarm и Canadarm-2,
мобильной системы обслуживания МКС.
Рассмотрены роботизированные элементы
в составе станции «Мир» – грузовые
стрелы и манипулятор-перестыковщик,
манипулятор системы «Буран». Выделены
направления дальнейшего развития
робототехники космического назначения.
Показано, что одной из актуальных является
задача автоматизированного монтажа и
обслуживания перспективных модульных
многофункциональных наращиваемых
космических систем.
Ключевые слова:
космическая робототехни-
ка, модульный принцип построения космиче-
ских объектов, роботизированная стыковка,
космические монтажно-сервисные робото-
технические системы
Павел Петрович БЕЛОНОЖКО,
Московский государственный технический университет
имени Н.Э. Баумана, факультет «Робототехника
и комплексная автоматизация», кафедра «Системы
автоматизированного проектирования», Москва,
Россия, доцент, кандидаттехнических наук, старший
научный сотрудник,
85
Воздушно-космическая сфера
I
Aerospace Sphere Journal №1(94) 2018


