88
АНАЛИТИКА
I
ANALYTICS
элементы можно считать функциональным
и в определенной степени конструктивным
прообразом средств робототехники, эксплуа-
тируемых в составе МКС.
В соответствии со сложившейся терминологи-
ей [11, 12, 24, 25] может быть выделена собствен-
но стыковка (docking) и стыковка при помощи
манипулятора, причаливание (berthing).
При непосредственной стыковке (docking) сред-
ствами систем управления поступательным
движением и ориентацией стыкуемых объектов
на момент касания должны быть обеспечены
требуемые начальные условия стыковки (вза-
имное положение и относительные линейная
и угловая скорости) [16–18]. После касания стыко-
вочное устройство последовательно обеспечива-
ет амортизацию, компенсациюначального про-
маха, сцепку (образование первичной связи),
выравнивание, стягивание, совмещение стыка
с окончательным выравниванием, жесткое со-
единение. При этом требования к стыку могут
предъявляться по точности, жесткости, прочно-
сти, герметичности [16–18].
К устройствам, реализующим данный тип
стыковки, относятся система «штырь – конус»,
андрогинный стыковочный агрегат (АПАС).
Данный тип стыковки успешно реализован,
в частности, при эксплуатации орбитальных
станций «Салют», «Мир», в рамках программ
«Аполлон» – «Союз», «Мир» – «Шаттл», а так-
же при стыковках шаттлов к МКС. На сегодня-
шний день используется при стыковке кораблей
«Союз» и «Прогресс» к российскому сегменту
МКС [11, 16–19, 21, 22].
Стыковкаприпомощиманипулятора(berthing),
благодаря наличию на одном из стыкуемых
объектов управляемого механизма-посредни-
ка, позволяет осуществить захват второго объ-
екта при их взаимной неподвижности, умень-
шить ударные воздействия в момент касания.
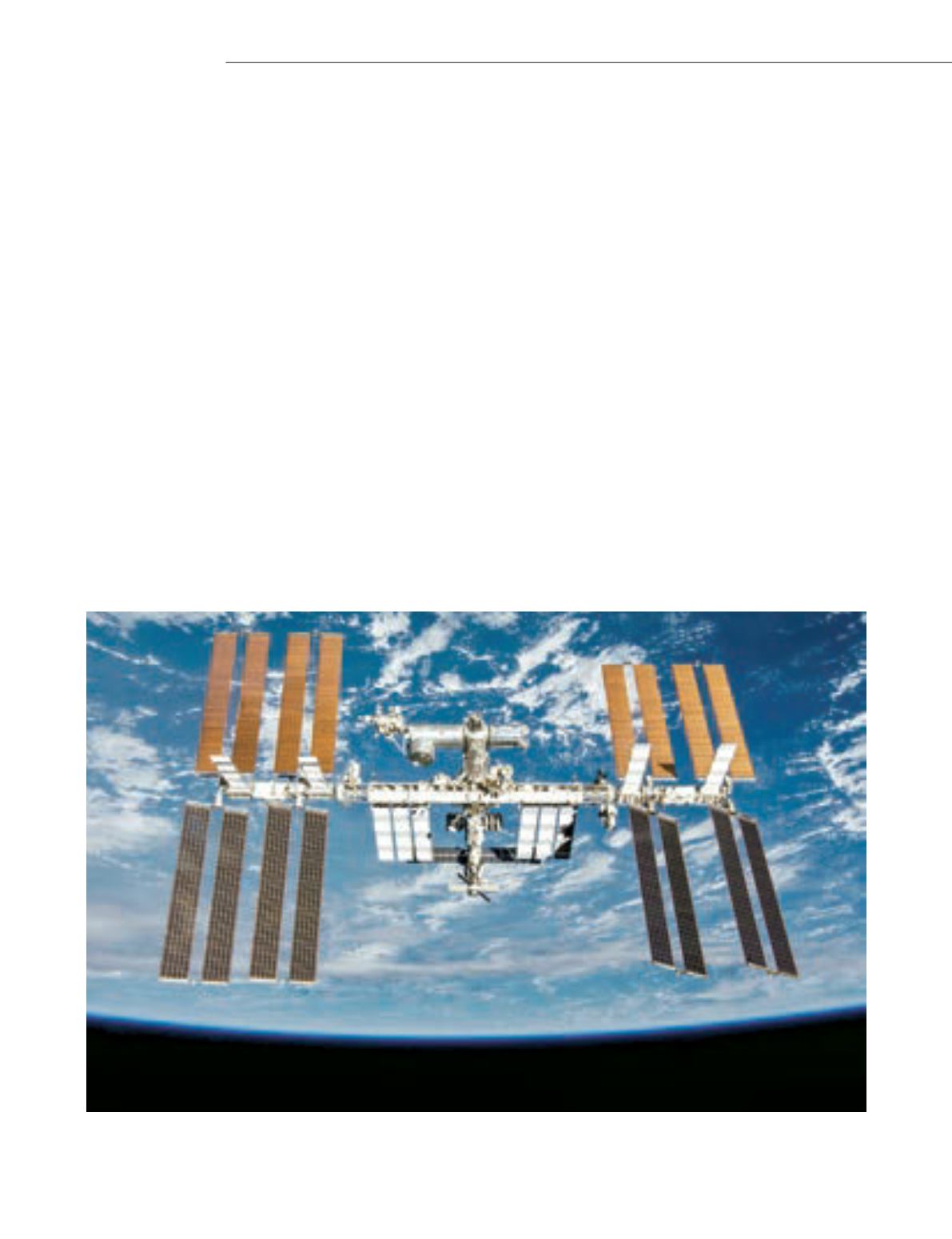
Этот способ стыковки был успешно реализо-
ван при создании негерметичной ферменной
структуры МКС
(рисунок 2)
, используется для
стыковки к американскому сегменту МКС гру-
зовых кораблей HTV, Cygnus, Dragon
(рисунок 3)
.
Важными элементами системы стыковки
при помощи манипулятора являются конце-
вой захват-эффектор манипулятора
(рисунок 4)
,
стыковочные узлы CBM (Common Berthing
Mechanism,
рисунок 3
) [11, 16–19, 21, 22, 24, 25].
Рисунок 2.
Негерметичная ферменная структура – Integrated Truss Structure (ITS) в составе МКС. Протяжен-
ность более 100 м. Предназначена для размещения различного оборудования, в первую очередь крупногаба-
ритных панелей солнечных батарей. Собрана посредством стыковки фрагментов при помощи манипулятора
[11], фото NASA


