Робот-аватар – средство телеприсутствия человека в космосе
Светлана Александровна Родькина , врач лечебной физкультуры, физиотерапевт ФГБУ «Детский медицинский центр» Управления делами Президента РФ, Москва, Россия
English
Robot avatar – a means of human telepresence in space
Введение
Космос – исключительно враждебная среда, к обитанию в которой человеческая физиология не приспособлена. Отсутствие силы тяжести вызывает атрофию поперечно-полосатой мускулатуры (мышц туловища и конечностей, миокарда), деминерализацию костной ткани, сопровождаемую увеличением хрупкости костей, перераспределение жидкости и обезвоживание организма, сердечно-сосудистые нарушения, изменения сенсорного восприятия, нарушения проприоцепции, равновесия, искажение управления движениями тела.
Воздействие космической радиации, в частности тяжелых заряженных частиц, приводит к гибели живых клеток органов и тканей человека, вызывает мутации и реакции, следствием которых может быть отказ иммунной системы, системы костного мозга, развитие онкологических заболеваний, дегенерация мозговой ткани, сопровождаемая ухудшением памяти, когнитивных способностей, и многое другое.
Для нормального существования человека необходимо наличие магнитного поля с характеристиками, аналогичными характеристикам магнитного поля Земли. В противном случае гипомагнитные условия будут оказывать отрицательное воздействие, изучение которого в настоящее время продолжается.
Чем больше мы получаем знаний о космосе, тем меньше у нас остается уверенности в том, что человек сможет беспрепятственно жить и работать там. А без присутствия человека исследование, освоение, а тем более использование космоса практически лишено смысла. В этой связи было бы целесообразно направить усилия на создание технологий телеприсутствия человека во враждебных средах, в том числе – и в первую очередь – в космосе и на планетах Солнечной системы.
В общем случае под телеприсутствием (от англ. telepresence) понимают функциональность, позволяющую оператору устройства телеприсутствия получать сенсорную информацию (видео, звук, возможно, тактильную и др.) из удаленной точки при помощи различных датчиков, установленных на неподвижной или подвижной платформе . В последнее время технологию телеприсутствия называют также технологией аватара.
Технология телеприсутствия позволяет оператору получать информацию о результатах «своих» действий и реализовать возможность практически полноценной, виртуально дополненной деятельности в открытом космосе или на поверхности другой планеты.
Очевидно, технология телеприсутствия, предназначенная для космических применений, будет подразумевать не только получение информации, но и какие-то активные действия, дистанционно задаваемые подвижной платформе (роботу-аватару) человеком-оператором. Благодаря обратной связи между сенсорами робота и аналогичными сенсорными системами человека оператор получает информацию о результатах «своих» действий и таким образом реализует возможность практически полноценной, виртуально дополненной деятельности в открытом космосе или на поверхности другой планеты.
Целью данной статьи является анализ перспектив создания и практического использования технологии аватаров, предназначенных для исследования, освоения и использования космоса, а также определение облика аватаров и систем сопряжения робота-аватара с человеком-оператором.
1. Возможный облик робота-аватара, предназначенного для работы в космосе и на планетах с агрессивными средами обитания
Для осмысленных и быстрых действий в такой враждебной среде, как космос, необходимо максимально возможное соответствие между сенсорными системами и исполнительными органами робота и человека: принятие решений и действия в экстремальных условиях больше основаны на рефлексах, спонтанных, интуитивных действиях, а не на действиях, четко осмысленных и осознанно спланированных.
В соответствии с учением Н. А. Бернштейна, успех в процессе эволюции в формировании двигательного контроля и управления у человека связан с полным представлением о структуре и составе осваиваемого движения. Поэтому наиболее эффективно человек может развить двигательное умение и маневренность применительно именно к антропоморфному телу [2, 3]. Следовательно, робот-аватар должен быть максимально антропоморфным. Режим копирующего управления, основанного на рефлексах и естественных манипуляциях своим телом, дает кратный выигрыш в скорости и точности по сравнению с управлением при помощи кнопок или джойстиков.
В отмечается, что антропоморфного робота-аватара, управляемого дистанционно в копирующем режиме, можно было создать уже в конце прошлого века: уровень развития науки и техники вполне позволял это сделать. Проблема в постановке такой задачи и организации ее решения.
В табл. 1 представлены некоторые современные антропоморфные роботы, в том числе два робота космического применения — Robonaut 2 (США) и FEDOR (Россия), способные функционировать в режиме ограниченного телеприсутствия.
Современные роботы представляют собой композитные металлопластиковые конструкции с электромеханическими приводами высокой степени подвижности (до 50 приводов). Системы управления построены на основе распределенной вычислительной системы с программным обеспечением, основанным на различных алгоритмах, которые, как правило, представляют ноу-хау фирмы-разработчика.
Разработка космического робота Robonaut началась еще в 1997 году, однако первая серия роботов, выпущенная в начале 2000-х, так и не полетела в космос. В 2006 году проектом заинтересовалась компания General Motors. В феврале 2010 года был продемонстрирован первый экземпляр R2. 24 февраля 2011 года Robonaut был доставлен на МКС, где он и по сей день выполняет некоторые действия, требующиеся в ходе проведения плановых экспериментов.
До 2012 года операторы на Земле, управляя роботом R2 на борту МКС в режиме аватара, практиковались в пользовании различными переключателями, а также в очистке поручней на борту станции.
Таблица 1. Результаты создания антропоморфных роботов
|
Робот, год разработки, разработчик |
Назначение (функции)
|
|
|
Robonaut 2 (R2), 2010 г., General Motors и NASA при содействии Oceaneering Space Systems, США |
Антропоморфный робот, отправленный на Международную космическую станцию для помощи космонавтам в выполнении различных задач. Может захватывать объекты, переключать различные коммутирующие устройства, осуществлять манипуляции с человеческими инструментами. Оснащен автономным и телеоперационным режимами (с МКС или Земли). В условиях Земли способен поднять груз весом 9,07 кг, удерживая его как вблизи туловища, так и на вытянутой руке. |
Рост – 101,6 см (от талии до головы). Ширина плеч – 78,74 см. Вес – 149,7 кг. |
|
Eccerobot (Embodied Cognition in a Compliantly Engineered Robot), 2011 г., Университет Сассекса, Великобритания |
Антропоморфный робот с антропомиметическим дизайном (искусственные кости, мышцы и сухожилия). Может безопасно взаимодействовать с людьми, в частности обниматься. Может вести разговор по скайпу, с направлением головы и жестами, контролируемыми удаленным оператором. |
Рост – 105 см. Ширина плеч – 48 см. Вес – 26 кг. |
|
Atlas, 2016 г., Boston Dynamics (в рамках конкурса, объявленного DARPA), США |
Самый ловкий из существующих антропоморфных роботов. Способен быстро двигаться по пересеченной местности и рыхлому снегу, динамически балансировать, поднимать и перемещать грузы, бегать, прыгать и делать сальто назад, забираться на преграды с помощью рук, сохранять равновесие после толчков и самостоятельно вставать после падения. Может чувствовать препятствия и вести переговоры во время движения по пересеченной местности. |
Рост – 150 см. Вес – 80 кг. Скорость перемещения – 5,4 км/ч. Переносимая нагрузка – 11 кг. Зрение – на основе лидара и стереокамеры. Число сочленений – 28. Источник энергии – батарея. Высокое соотношение прочности и веса. Предусмотрены режимы автономного движения и движения в режиме телеуправления. Предназначен для эксплуатации на открытом воздухе и внутри зданий. Выполняется как с электрическим, так и с гидравлическим приводом.
|
|
FEDOR (Final Experimental Demonstration Object Research), 2014-2019 гг., НПО «Андроидная техника» и Фонд перспективных исследований [4, 5] |
Способен открывать дверь, работать с дрелью и другими инструментами, садиться и водить автомобиль и квадроцикл в автономном режиме, проходить лабиринт «змейка», подниматься по ступеням.
|
Рост – 184 см. Ширина плеч – 52 см (48 см в космической версии). Вес – 160 кг (105 в космической версии). Мощность силовой установки – 13,5 кВт. Система электропитания – двойная: по кабелю и от встроенного аккумулятора. При подготовке к космической миссии были использованы две встроенные АКБ от скафандра «Орлан». Длительность работы в автономном режиме – 1 час. Количество сервоприводов – 48. Для защиты от быстрого охлаждения при низких температурах оснащен системой подогрева важных узлов. |




Антропоморфный робот FEDOR, оснащенный системой распознавания и синтеза речи, в августе 2019 года совершил полет на Международную космическую станцию на корабле «Союз МС-14» в центральном кресле пилота. Робот способен работать в режиме аватара под управлением оператора через систему спутниковой связи.
Из приведенных в табл. 1 антропоморфных роботов максимально похож на человека в плане анатомии Eccerobot. Он имеет около сотни искусственных мышц, отвечающих за движение. Особенно развита у машины мимика лица.
В части скоординированности и скорости передвижения на двух ногах наиболее продвинут робот Atlas, способный передвигаться по пересеченной местности, а также карабкаться по вертикальным поверхностям с помощью рук и ног, делать сальто и т.д. Первая версия, выпущенная в 2013 году, была оснащена кабелем, через который подавалось электропитание и осуществлялся контроль над роботом. Новая модификация, получившая имя Atlas Unplugged (беспроводной Atlas), работает на аккумуляторе и использует беспроводное управление.
В отличие от существующих, перспективные роботы-аватары, предназначенные для космических применений, должны:
- в полной мере реализовывать принципы удаленного телеприсутствия человека-оператора;
- иметь сенсорную систему и систему исполнительных органов, максимально соответствующие анатомии человека;
- обладать ограниченной (частичной) автономностью, необходимой в ситуации большой задержки или даже прерывания обмена данными с человеком-оператором;
- обладать устойчивостью по отношению к действующим неблагоприятным факторам космического пространства или других планет.
В отличие от первого требования остальные могут быть реализованы на основе существующих технологий (рис. 1).
Однако ключевое отличие аватаров от обычных роботов телеприсутствия заключается в том, что аватар должен быть «синхронизирован» с человеком-оператором: передавать полный спектр сигналов – данных об окружающей обстановке – и повторять его движения, повинуясь управляющим командам, формируемым интерфейсом «робот-аватар – человек-оператор». При этом информационные сигналы могут передаваться через канал сотовой или спутниковой связи с соответствующей задержкой , возрастающей по мере роста расстояния между роботом и человеком.
Ключевое отличие аватаров от обычных роботов телеприсутствия заключается в том, что аватар должен быть «синхронизирован» с человеком-оператором: передавать полный спектр сигналов – данных об окружающей обстановке – и повторять его движения, повинуясь управляющим командам, которые формируются интерфейсом «робот-аватар – человек-оператор».
В марте 2018 года фонд XPRIZE сообщил о запуске конкурса по созданию роботов-аватаров. Соревнование будет спонсироваться авиакомпанией All Nippon Airways (ANA), а призовой фонд составит 10 млн долларов . Само соревнование будет проходить в 2021 году. Команду-победителя объявят в начале 2022 года.
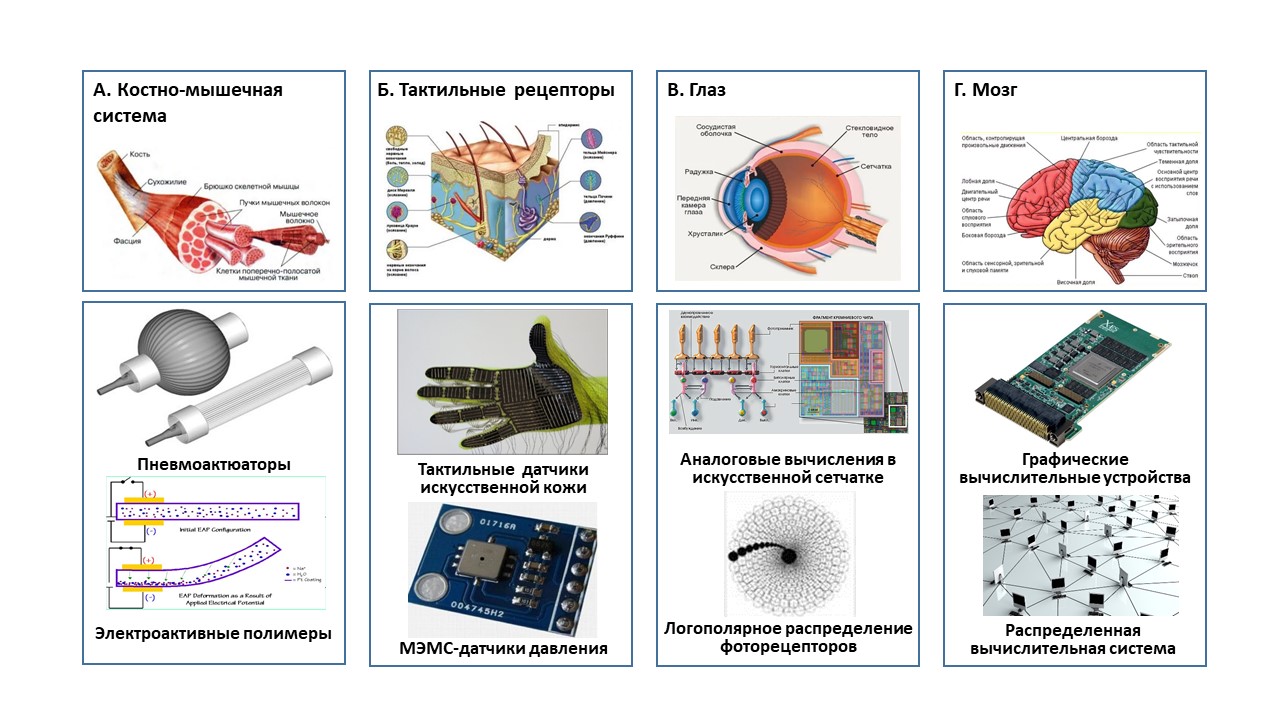
Рис.1. Технологии антропоморфных роботов
2. Интерфейс между человеком-оператором и роботом-аватаром
В настоящее время рассматриваются два возможных направления реализации интерфейса между роботом-аватаром и человеком:
- на основе повторения роботом реальных физических движений человека (человек находится в специальном костюме телеприсутствия)
- на основе нейроинтерфейса (человек неподвижно лежит или сидит).
Костюм телеприсутствия – это устройство, обеспечивающее двустороннюю связь «человек – аватар» и «аватар – человек». Система воссоздания реальности должна быть максимально точной. Очевидно, что при этом реальные условия, в которых будет находиться робот, для человека, находящегося в режиме оператора аватара, будут являться виртуальными. Сложнейшая задача кроется в передаче информации о реальном взаимодействии со средой от робота к человеку и адекватном восприятии ее человеком.
Костюм телеприсутствия представляет собой экзоскелет или мягкую экзооболочку со встроенными сенсорами и VR-шлем или VR-очки (рис. 2).
Прототипом костюма телеприсутствия может являться костюм-экзоскелет («внешний» скелет), представляющий собой автоматическую конструкцию, предназначенную для восстановления утраченных или усиления имеющихся функций опорно-двигательного аппарата человека.
Экзоскелет в режиме костюма телеприсутствия передает сигналы от опорно-двигательного аппарата человека-оператора роботу-аватару. При этом робот-аватар передает человеку информацию от своих сенсорных датчиков, по сути, усиливая сенсорные способности оператора.
Экзоскелет в режиме костюма телеприсутствия выполняет обратную (по отношению к упомянутой выше) функцию: передачи сигналов от опорно-двигательного аппарата человека-оператора роботу-аватару. При этом робот-аватар передает человеку информацию от своих сенсорных датчиков, по сути, усиливая сенсорные способности оператора.
VR-шлем или VR-очки предназначены для приема человеком-оператором аудиовизуальной информации от робота-аватара.
.jpg)



Рис. 2. Экзоскелет – костюм телеприсутствия – и его элементы
В целях более адекватного управления роботом-аватаром оператор может быть помещен в специальный подвес типа карданова (рис. 3) .
При этом карданов подвес обеспечивает согласованность ощущений вестибулярного аппарата оператора, сигналов от сенсоров конечностей робота-аватара и передаваемого им видеоряда. Оператор, свободно меняющий свое угловое положение в пространстве, сможет иметь тот же наклон относительно горизонта, что и корпус робота-аватара в космосе или на поверхности другого небесного тела.
Для передачи движения кисти руки и пальцев руки от оператора к роботу в настоящее время предлагается использовать технологию Intel RealSense, позволяющую отслеживать не только ладони, но и пальцы, и даже фаланги пальцев – до 22 точек на каждой кисти .
Экзоскелет (экзооболочка) оснащается различными видами сенсоров и устройств передачи информации в обоих направлениях: от человека к роботу-аватару и от аватара к человеку. При регистрации движения оцениваются углы, скорости и моменты сил сгибания конечностей в различных суставах, сила воздействия, скорость перемещения и величина давления на поверхность, а также электрические потенциалы мышц (ЭМГ), что позволяет оптимизировать связь между оператором и экзоскелетом и учитывать физиологические особенности оператора .

Рис. 3. Оператор робота-аватара в кардановом подвесе
Нейроинтерфейс (или интерфейс «мозг — компьютер») – устройство для обмена информацией между мозгом и внешним устройством. Мысленные команды человека расшифровываются по записи электрической активности его головного мозга и передаются на объект управления, в роли которого может выступать любое электронное устройство, в том числе и космический робот .
Еще в конце 1960-х годов выяснилось, что произвольное управление активностью ответственных за движения нейронов возможно и без совершения синхронных движений . Этот результат лежит в основе принципа управления роботом-аватаром при помощи мысли человека-оператора.
В начале 2000-х годов несколько лабораторий в различных странах мира начали конкурировать друг с другом в области разработки интерфейса «мозг – компьютер». В частности, исследователи имплантировали мультиэлектродные матрицы в моторную кору мозга человека, что позволяло операторам управлять роботизированным манипулятором . К настоящему времени удалось добиться максимального контроля в управлении антропоморфной роботизированной рукой .
Считывание сигналов электрической активности мозга может производиться с помощью инвазивных или неинвазивных датчиков. Инвазивные датчики вживляются в кору головного мозга оперативным путем. Такие сенсоры считывают информацию с окружающих нейронов и отличаются более точным и чистым (без помех) сигналом.
Примером инвазивного нейроинтерфейса является стартап Neuralink (рис. 4), презентованный И. Маском в июле 2019 года , – новая технология беспроводного нейроинтерфейса с использованием так называемой нейронной пыли. Частицы нейронной пыли представляют собой кремниевые сенсоры размером 100 мкм, которые должны впрыскиваться прямо в кору головного мозга. Рядом, над твердой мозговой оболочкой, будет располагаться 3-миллиметровое устройство, которое сможет взаимодействовать с нейронной пылью при помощи ультразвука.

Рис. 4. Интерфейс «мозг – компьютер» типа «нейронная пыль» («нейронное кружево»)
Неинвазивный интерфейс значительно безопасней с медицинской точки зрения. В частном случае он может представлять собой шлем или шапочку с электродами для снятия электроэнцефалограммы (ЭЭГ-электроды) и надевается на голову. Точность такого прибора несколько ниже [20, 21].
По способу активации мозга метод может быть независимым (эндогенная активация – воображение движения) и зависимым (экзогенная активация – демонстрация движения на экране). В первом случае для управления используются медленные корковые потенциалы, мю- (8-12 Гц), бета- (18-30 Гц) и гамма-ритмы (30-70 Гц) . Во втором случае фокусировка внимания на внешнем зрительном стимуле приводит к хорошо выраженной реакции зрительной коры в сравнении с реакцией на стимул, оставленный без внимания, и намерения оператора расшифровываются на основе предварительно записанной разности реакций на замеченные и проигнорированные стимулы.
Помимо ЭЭГ для создания неинвазивного нейроинтерфейса может быть использована магнитоэнцефалография (МЭГ) с использованием сверхпроводящих квантовых магнитометров. МЭГ обеспечивает лучшее временное и пространственное разрешение, чем ЭЭГ.
Другие неинвазивные методы регистрации активности мозга (отслеживание концентрации оксигемоглобина и дезоксигемоглобина в мозговом кровотоке посредством ближней инфракрасной спектроскопии - БИКС, функциональная магнитно-резонансная томография и др.) имеют худшие характеристики по временной задержке сигнала, более сложную аппаратную реализацию и т.д.
3. Защита человека-оператора от экстремальных сенсорных сигналов робота-аватара.
В случае максимально реалистичной передачи информации оператору, при попадании робота-аватара в экстремальную ситуацию – столкновение с предметом, падение с высоты, сильное механическое воздействие, высокое давление, яркие вспышки, непереносимые звуки и так далее – существует опасность нанесения вреда здоровью человека, сопряженного с устройством. Поэтому все системы сопряжения должны быть настроены с учетом определенного диапазона действия и моментальным отключением синхронизации в случае возникновения подобной опасности и превышения допустимых порогов.
Также существуют и другие опасности, связанные с управлением роботом-аватаром, обусловленные в основном негативным побочным воздействием виртуальной реальности на организм человека. Среди таких эффектов: общий дискомфорт, головная боль, головокружение, нарушение работы сердечно-сосудистой и центральной нервной систем и др. .
В этой связи необходимо будет разработать систему медицинской и психологической профилактики для операторов аватаров.
Заключение
По мере увеличения объема знаний о последствиях воздействия факторов космического пространства на организм человека все в большей степени будет осознаваться необходимость развития технологии роботов-аватаров.
Несмотря на громкие заявления о скорых регулярных полетах к Луне, о будущей колонизации Марса и других планет, реальность представляет совершенно иную картину.
По нашему убеждению, уверенное движение вперед на данном историческом этапе освоения и использования космоса возможно лишь с использованием роботов-аватаров как средства телеприсутствия человека в космосе.
На аватаров могли бы быть возложены следующие функции:
- внекорабельная деятельность в открытом космосе;
- визуальные и напланетные (с помощью приборов) исследования небесных тел Солнечной системы, в том числе в экстремальных условиях (повышенная гравитация, агрессивная среда, высокие температура и давление и др.);
- строительно-монтажные работы в космосе, включая сборку больших конструкций;
- обслуживание производственных модулей;
- спасательные операции в космосе и на поверхности небесных тел и др.
Управление роботом-аватаром могло бы осуществляться с орбитальной (космической) станции или с напланетной базы, хорошо защищенной от неблагоприятных факторов космического пространства, или даже с Земли.
Литература:
1. Бойко А. Телеприсутствие. Роботы телеприсутствия [Электронный ресурс] // RoboTrends. URL: http://robotrends.ru/robopedia/teleprisutstvie.-roboty-teleprisutstviya (Дата обращения: 25.02.2020).
2. Подводный антропоморфный робот – аватар, или Зачем подводному роботу ноги [Электронный ресурс]. URL: http://streltsovaleks.narod.ru/ (Дата обращения: 02.02.2020).
3. Бернштейн Н.А. Физиология движений и активность / под ред. академика О. Г. Газенко. М.: Наука, 1990. 494 с.
4. Robots. Your Guide to the World of Robotics [Электронный ресурс] // Robots. URL: https://robots.ieee.org/robots/ (Дата обращения: 01.03.2020).
5. Робот Федор: особенности, характеристики и назначение [Электронный ресурс] // Robo Sapiens. Портал о робототехнике. 08.11.2017. URL: https://robo-sapiens.ru/stati/robot-fedor/ (Дата обращения: 01.03.2020).
6. Бойко А. Аватары [Электронный ресурс] // RoboTrends. URL: http://robotrends.ru/robopedia/avatary (Дата обращения: 01.02.2020).
7. Создание робота-аватара: что уже известно о конкурсе XPRIZE [Электронный ресурс] // Robo Hunter. Новости. 14.09.2018. URL: https://robo-hunter.com/news/sozdanie-robota-avatara-chto-uje-izvestno-o-konkurse-xprize13243 (Дата обращения: 02.02.2020).
8. HP Reverb – обзор нового VR сета [Электронный ресурс] // Хабр. 18.05.2019. URL: https://habr.com/ru/post/452414/ (Дата обращения: 08.02.2020).
9. Toyota представила нового гуманоидного робота T-HR3 сета [Электронный ресурс] // Хабр. 26.11.2017. URL: https://habr.com/ru/post/408413/ (Дата обращения: 08.02.2020).
10. ExoHand. New areas for action for man and machine [Электронный ресурс] // Festo. URL: https://www.festo.com/group/en/cms/10233.htm (Дата обращения: 08.02.2020).
11. Очки виртуальной реальности VR Shinecon [Электронный ресурс] // Интернет-магазин Ozon. URL: https://www.ozon.ru/context/detail/id/167297611/?utm_source=yandex_direct&utm_medium=cpc&utm_campaign=product_15500_mspt_dsa_all_tech_Igroviepristavki_normal_46099723&utm_term=_cbrx_2121356 (Дата обращения: 08.02.2020).
12. Способ Стрельцова принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом-аватаром [Электронный ресурс] // URL: http://streltsovaleks.narod.ru/HeadAndPelvis.html (Дата обращения: 09.02.2020).
13. Технология Intel® RealSense™ [Электронный ресурс] // Корпорация Интел. URL: http://www.intel.ru/content/www/ru/ru/architecture-and-technology/realsense-overview.html (Дата обращения: 01.03.2020).
14. Patton J., Mussa-Ivaldi F. Robot-assisted adaptive training: custom force fields for teaching movement patterns // IEEE Transactions on Biomedical Engineering. 2004. Vol. 51. No. 4. Pp. 636 – 646.
15. Левицкая О. С., Лебедев М. А. Интерфейс мозг – компьютер: будущее в настоящем // Вестник РГМУ. 2016. № 2. С. 4 – 16.
16. Fetz E.E. Operant conditioning of cortical unit activity // Science. 1969. Feb 28. Vol. 163. Iss. 3870. Pp. 955 – 958.
17. Hochberg L.R., Bacher D., Jarosiewicz B., Masse N.Y., Simeral J.D., Vogel J. et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm // Nature. 2012. May 16. No. 485. Pp. 372 – 375. https://doi.org/10.1038/nature11076
18. Collinger J.L., Wodlinger B., Downey J.E., Wang W., Tyler-Kabara E.C., Weber D.J. et al. High-performance neuroprosthetic control by an individual with tetraplegia // Lancet. 2013. Feb 16. Vol. 381. Iss. 9886. Pp. 557 – 564. DOI: 10.1016/S0140-6736(12)61816-9
19. An integrated brain-machine interface platform with thousands of channels. URL: https://www.documentcloud.org/documents/6204648-Neuralink-White-Paper.html (Дата обращения: 01.03.2020).
20. Клопот С. Нейроинтерфейс «Ростеха» поступит в продажу в 2019 году [Электронный ресурс] // Инвестиционный портал 365-invest. URL: https://365-invest.com/neyrointerfeys-rosteha-postupit-v-prodazhu-v-2019-godu/ (Дата обращения: 01.03.2020).
21. Голованов Г. Создан первый эффективный неинвазивный интерфейс [Электронный ресурс] // Хайтек+. 20.06.2019. URL: https://hightech.plus/2019/06/20/sozdan-pervii-effektivnii-neinvazivnii-neirointerfeis (Дата обращения: 15.12.2019).
22. McFarland D.J., Krusienski D.J., Wolpaw J.R. Brain-computer interface signal processing at the Wadsworth Center: mu and sensorimotor beta rhythms // Progress in Brain Research. 2006. Vol. 159. Pp. 411 – 419. DOI: 10.1016/S0079-6123(06)59026-0
23. Mellinger J., Schalk G., Braun Ch., Preissl H., Rosenstiel W., Birbaumer N., Kübler A. An MEG-based brain-computer interface (BCI) // Neuroimage. 2007. Jul 1. Vol. 36. No. 3. Pp. 581 – 593. DOI: 10.1201/b11821-21
24. Kim H.K., Park J., Choi Y., Choe M. Virtual reality sickness questionnaire (VRSQ): Motion sickness measurement index in a virtual reality environment // Applied Ergonomics. 2018. Vol. 69. Pp. 66 – 73.
References
1. Boyko A. Teleprisutstvie. Roboty teleprisutstviya. RoboTrends. Available at: http://robotrends.ru/robopedia/teleprisutstvie.-roboty-teleprisutstviya (Retrieval date: 25.02.2020).
2. Podvodnyy antropomorfnyy robot – avatar, ili Zachem podvodnomu robotu nogi. Available at: http://streltsovaleks.narod.ru/ (Retrieval date: 02.02.2020).
3. Bernshteyn N.A. Fiziologiya dvizheniy i aktivnost'. Ed. O. G. Gazenko. Moscow, Nauka, 1990. 494 p.
4. Robots. Your Guide to the World of Robotics. Robots. Available at: https://robots.ieee.org/robots/ (Retrieval date: 25.01.2020).
5. Robot Fedor: osobennosti, kharakteristiki i naznachenie. Robo Sapiens. Portal o robototekhnike. 2017. Nov 08. Available at: https://robo-sapiens.ru/stati/robot-fedor/ (Retrieval date: 25.01.2020).
6. Boyko A. Avatary. RoboTrends. Available at: http://robotrends.ru/robopedia/avatary (Retrieval date: 01.02.2020).
7. Sozdanie robota-avatara: chto uzhe izvestno o konkurse XPRIZE. Robo Hunter. Novosti. 2018. Sept 14. Available at: https://robo-hunter.com/news/sozdanie-robota-avatara-chto-uje-izvestno-o-konkurse-xprize13243 (Retrieval date: 02.02.2020).
8. HP Reverb – obzor novogo VR seta. Khabr. 2019. May 18. Available at: https://habr.com/ru/post/452414/ (Retrieval date: 08.02.2020).
9. Toyota predstavila novogo gumanoidnogo robota T-HR3 seta. Khabr. 2017. Nov 26. Available at: https://habr.com/ru/post/408413/ (Retrieval date: 08.02.2020).
10. ExoHand. New areas for action for man and machine. Festo. Available at: https://www.festo.com/group/en/cms/10233.htm (Retrieval date: 08.02.2020).
11. Ochki virtual'noy real'nosti VR Shinecon. Internet-magazin Ozon. Available at: https://www.ozon.ru/context/detail/id/167297611/?utm_source=yandex_direct&utm_medium=cpc&utm_campaign=product_15500_mspt_dsa_all_tech_Igroviepristavki_normal_46099723&utm_term=_cbrx_2121356 (Retrieval date: 08.02.2020).
12. Sposob Strel'tsova prinuditel'noy uglovoy orientatsii golovy i taza cheloveka-operatora v mekhanizme podvesa, primenyaemogo dlya distantsionnogo upravleniya antropomorfnym robotom-avatarom. Available at: http://streltsovaleks.narod.ru/HeadAndPelvis.html (Retrieval date: 09.02.2020).
13. Tekhnologiya Intel® RealSense™. Intel. Available at: http://www.intel.ru/content/www/ru/ru/architecture-and-technology/realsense-overview.html (Retrieval date: 01.03.2020).
14. Patton J., Mussa-Ivaldi F. Robot-assisted adaptive training: custom force fields for teaching movement patterns. IEEE Transactions on Biomedical Engineering, 2004, vol. 51, no. 4, pp. 636 – 646.
15. Levitskaya O. S., Lebedev M. A. Interfeys mozg – komp'yuter: budushchee v nastoyashchem. Vestnik RGMU, 2016, no. 2, pp. 4 – 16.
16. Fetz E. E. Operant conditioning of cortical unit activity. Science, 1969, Feb 28, vol. 163, iss. 3870, pp. 955 – 958.
17. Hochberg L.R., Bacher D., Jarosiewicz B., Masse N.Y., Simeral J.D., Vogel J. et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature, 2012, May 16, no. 485, pp. 372 – 375. DOI: https://doi.org/10.1038/nature11076
18. Collinger J.L., Wodlinger B., Downey J.E., Wang W., Tyler-Kabara E.C., Weber D.J. et al. High-performance neuroprosthetic control by an individual with tetraplegia. Lancet, 2013, Feb 16, vol. 381, iss. 9886, pp. 557 – 564. DOI: 10.1016/S0140-6736(12)61816-9
19. An integrated brain-machine interface platform with thousands of channels. Available at: https://www.documentcloud.org/documents/6204648-Neuralink-White-Paper.html (Retrieval date: 01.03.2020).
20. Klopot S. Neyrointerfeys «Rostekha» postupit v prodazhu v 2019 godu. 365-invest. Available at: https://365-invest.com/neyrointerfeys-rosteha-postupit-v-prodazhu-v-2019-godu/ (Retrieval date: 01.03.2020).
21. Golovanov G. Sozdan pervyy effektivnyy neinvazivnyy interfeys. Khaytek+. 2019. Jun 20. Available at: https://hightech.plus/2019/06/20/sozdan-pervii-effektivnii-neinvazivnii-neirointerfeis (Retrieval date: 01.03.2020).
22. McFarland D.J., Krusienski D.J., Wolpaw J.R. Brain-computer interface signal processing at the Wadsworth Center: mu and sensorimotor beta rhythms. Progress in Brain Research, 2006, vol. 159, pp. 411 – 419. DOI: 10.1016/S0079-6123(06)59026-0
23. Mellinger J., Schalk G., Braun Ch., Preissl H., Rosenstiel W., Birbaumer N., Kübler A. An MEG-based brain-computer interface (BCI). Neuroimage, 2007, Jul 1, vol. 36, no. 3, pp. 581 – 593. DOI: 10.1201/b11821-21
24. Kim H.K., Park J., Choi Y., Choe M. Virtual reality sickness questionnaire (VRSQ): Motion sickness measurement index in a virtual reality environment. Applied Ergonomics, 2018, vol. 69, pp. 66 – 73.
© Клюшников В.Ю., Родькина С.А., 2020
История статьи:
Поступила в редакцию: 03.02.2020
Принята к публикации: 24.02.2020
Модератор: Дмитрюк С.В.
Конфликт интересов: отсутствует
Для цитирования:
Клюшников В.Ю., Родькина С.А. Робот-аватар – средство телеприсутствия человека в космосе // Воздушно-космическая сфера. 2020. № 2. С. 60-69.
Авата́р (санскр. अवतार, avatāra — «нисхождение») — термин в философии индуизма, обычно используемый для обозначения нисхождения божества на землю, его воплощения в человеческом облике.
 5052
5052