Rosetta: богатый событиями этап крейсерского полёта
Технический перевод статьи журнала ROOM, № 3(9) 2016
В третьей из своих четырёх эксклюзивных статей для журнала ROOM он вспоминает о сложных и неожиданных событиях, случившихся во время крейсерского полёта, который включал Марс и пролёты мимо Земли, а затем второй и последний, поражающий воображение, облёт астероида – реализованная цель космического полёта.
Маршевый полёт к Марсу представил нам первую возможность снизить частоту контактов с Rosetta. Мы решили дойти до одного контакта в неделю и набраться подобного опыта до перехода на более длительные периоды. Проектировщики космического аппарата подобрали специальный режим управления ориентацией на этапе спокойного крейсерского полёта, чтобы сохранить срок службы некоторых бортовых блоков. Такой режим, в свою очередь, ограничивает большую часть операций на космическом корабле, при этом позволяя наземным командам расслабиться и восстановить силы после интенсивных усилий последних лет.
Между тем летом 2005 года два независимых события разрушили все наши помыслы о спокойном этапе крейсерского полёта. Во-первых, в начале августа кратковременный сбой бортового двигателя системы управления полётом привёл к аномальному изменению скорости Rosetta, тем самым вызвав обеспокоенность рабочим состоянием космического аппарата.
Через месяц, в начале сентября, Солнце решило нас взять на испуг, ослепляя систему астросопровождения Rosetta, заливая её заряженными частицами из большого коронального выброса массы. Оба события произошли, когда Rosetta был вне зоны радиосвязи, и мы кое-как всё быстро вернули в состояние штатной ситуации.
Летом 2005 два независимых события прервали наши мечты о спокойном крейсерском полёте
Подобные тревожные события подтвердили, что лучше нам отказаться от своих планов поддержания связи с космическим кораблём на ежемесячной основе. По этой причине мы провели дополнительные сверки бортового программного обеспечения и решили, что на протяжении всего этапа крейсерского полёта мы будем связываться с космическим кораблём, по крайней мере, один раз в неделю, чтобы избежать дальнейших неприятных сюрпризов.
В августе 2006 года произошло ещё одно событие за пределами видимости, на этот раз с далеко идущими последствиями: во время периодической проверки состояния движительной системы мы обнаружили, что показание давления гелия в изолированной секции газопровода, над регулятором давления, снизилось до нуля.
.jpg)
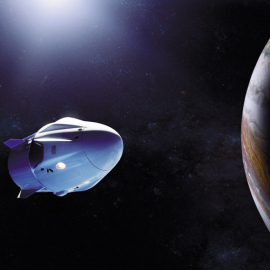
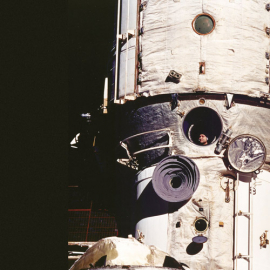
Второй пролёт мимо Земли, изображение, полученное с камеры OSIRIS (слева). Команда динамики полёта на раннем этапе маршевого режима (справа)
Мы не располагали непрерывной телеметрией этого считывания показаний прибора, поскольку активация электроники датчика давления производилась только каждые несколько недель, поэтому мы не могли понять: либо это неисправность датчика, либо реальное падение давления. Вероятность последнего пугала, поскольку указывало, что где-то произошла утечка газообразного гелия на борту космического аппарата. При этом космический аппарат находился в безопасности, потому что потенциальная утечка произошла в изолированном отсеке.
Тем не менее повторный наддув, запланированный на 2011 год перед большими манёврами сближения, вновь откроет этот отсек, подвергая космический корабль потенциально высокому риску. Между тем без повторного наддува мы не знали, сможем ли мы вообще когда-либо достичь кометы!
У нас не было времени, чтобы решать эту проблему до 2011 года. На земле мы приступили к многочисленным испытаниям и исследованиям. Сначала были сомнения относительно датчика давления, затем регулятора давления, но в любом случае мы тестировали стратегию для осуществления миссии при обстоятельствах, если будем не в состоянии произвести повторный наддув.
За это время в команде произошли некоторые дальнейшие изменения. В конце 2006 года Манфред Вораут стал начальником Департамента полётных операций, а я сменил его на посту руководителя нашего подразделения, на которое была возложена ответственность за полётные операции всех научных миссий ЕКА, связанных с Солнцем и Солнечной системой. В рамках своей должности я по-прежнему отвечал за выполнение миссии Розетта, но мне пришлось расстаться с обязанностями руководителя группы сопровождения космического аппарата.
Внезапно колебания увеличились по абсолютной величине и переступили порог в два градуса, который инициировал бортовой безопасный режим космического аппарата
К счастью, к этому времени Venus Express вошёл в устойчивый режим работы на Венере, и мы решили отозвать Андреа Аккомаццо, который занял мою прежнюю должность в качестве руководителя группы сопровождения космического аппарата Rosetta. Одновременно, Эльзу Монтаньон назначили руководителем группы сопровождения космических аппаратов в предстоящей миссии BepiColombo к Меркурию. Она оставила команду Rosetta, но всё ещё остаётся в подразделении, в тех же кулуарах, куда можно добраться в случае необходимости. Таким образом, нам удалось пройти через эти карьерные изменения, сохранив при этом людей, которые по-прежнему на различных уровнях участвуют в продолжении миссии.
Это был февраль 2007 года, когда мы, наконец, прибыли на Марс. Подготовительные работы на этом этапе отличались повышенной сложностью из-за новой траектории, которая привела Rosetta в тень Марса в течение 24 минут порядка наибольшего приближения. Примерно в то же время Красная планета также закрыла космический аппарат, так что у нас, в свою очередь, последовало запланированное прерывание сигнала.
.jpg)
Команда управления полётом Rosetta во время пролёта мимо астероида Лютеции
В команде Rosetta Чема Моралес взял на себя ведущую роль в подготовке этого этапа, ему пришлось столкнуться с разного рода проблемами: от попыток убедить учёных в необходимости отключить их инструментарий во время наибольшего приближения с целью экономии энергии и до для анализа, планирования и тестирования конфигурации космического аппарата, которая позволит сократить количество активных блоков до абсолютно незаменимых, чтобы обеспечить «сохранение жизнеспособности» на время 24 минут затмения. Наконец, потребовалось, в свою очередь, придавать требуемую конфигурацию бортовому программному обеспечению Rosetta, чтобы космический аппарат не реагировал на отсутствие солнца путём активации режима выживания.
Пролёт случился очень рано утром 25 февраля 2007 года. Мы собрали вместе всю команду управления полётами, и я впервые присутствовал в качестве пилотажного директора Rosetta. После того как в 03:13 мы потеряли радиосигнал, когда космический корабль скрылся за Марсом, драматизм ситуации в главном зале управления ощущался в полной мере. Мы знали, что через две минуты начнётся затмение и он окажется вне зоны видимости. Настолько же огромным было облегчение, когда в 03:28, как и было запланировано, мы увидели, что радиочастотная несущая S-диапазона Rosetta появилась на другой стороне планеты. Затмение закончилось в 03:40, и через 10 минут космический аппарат смог возобновить передачу телеметрической информации в полном объёме; к тому же мы отметили, что он абсолютно здоров. Ещё одна веха пройдена на долгом пути к намеченной комете!
Испытания подтвердили, к сожалению, что утечка была реальной и что единственный способ сохранить её в изоляции – избежать повторной накачки
Марс отклонился, насколько предусматривала наша пертурбационная траектория обратно к Земле, которую мы достигли в ноябре 2007 года, куда мы повторно заскочили, чтобы разогнать наш космический аппарат. Наш первый опыт захода к Земле в 2005 году показал, что мы весьма благополучно выполнили все важнейшие мероприятия. Затем, естественно, мы начали готовиться к преодолению следующей проблемы – первого пролёта мимо астероида на малой высоте, когда-либо предпринимаемого европейским космическим аппаратом.
Целью послужил астероид 2867-Šteins, а пролёт планировался 5 сентября 2008 года на расстоянии 800 км при относительной скорости 8,6 м/с. Как и в предыдущем случае, нам предстояло отработать совершенно новые процедуры, и наша команда динамики полёта приступила к работе с операциями навигационной камеры. Сначала камера использовалась в качестве оптического инструмента для навигации, чтобы восполнить неточность наших познаний относительного положения между Rosetta и астероидом. С помощью съёмки астероида в течение нескольких недель – до приближения и измерения его видимого движения в небе относительно звёзд – его положение в двух направлениях, перпендикулярных направлению полёта Rosetta, можно было определить с необходимой точностью.
Бортовое программное обеспечение управления ориентацией, в свою очередь, будет использовать навигационную камеру, чтобы направлять космический корабль во время этапа минимального сближения таким образом, что камера и другие научные приборы будут непрерывно вести на астероид. Утро дня сближения наша команда динамики полёта начала со сражения с камерой, которой никак не удавалось определить положение астероида в стабильном режиме в своей зоне видимости: уровень шума в фоновом режиме был выше ожидаемого из-за наличия пикселей со значительно более высокой скоростью сигнала, превышающей средний фоновый режим.
Отчаянные попытки использовать различные установки параметров камеры, и систему ориентации, и орбитального маневрирования (AOCS), в конечном итоге помогли решить проблему стабильного управления ориентацией, гарантируя благоприятный исход мероприятию. В течение всей фазы пролёта работали все инструменты дистанционного зондирования Rosetta, а камера системы оптической спектрографии и получения ИК-изображений (ОСИРИС) передавала изображения 5 км астероида Штейнс, являя миру его завораживающую, алмазоподобную форму и целый ряд интересных особенностей поверхности.
.jpg)
Изображение астероида Лютеция, полученное с камеры Osiris при минимальном сближении
В конце 2009 года мы провели бортовое испытание, чтобы понять возможные причины показаний низкого давления гелия ещё в августе 2006 года (мы ждали, пока не вернёмся на расстояние, близкое к Земле, чтобы иметь возможность быстро подключиться в режиме реального времени в случае возникновения проблемы). Испытания подтвердили, к сожалению, что утечка была реальной и что единственный способ сохранить её в изоляции – это не проводить повторный наддув.
После того как производитель подтвердил, что двигатели в состоянии работать ниже минимального квалификационного давлении 7 бар, мы предприняли некоторые меры, чтобы свести к минимуму неэффективность использования топлива при низком давлении и изменили стратегию маневрирования после режима бездействия. Во многом благодаря нашей команде динамики полёта и их достигшим совершенства навигационным навыкам, мы нашли способ выполнить задачу при низком давлении в резервуарах, что позволит избежать рисков, связанных с повторным наддувом.
После второго и последнего захватывающего пролёта мимо астероида 21-Лютеция 10 июля 2010 года, вероятно, в самый жаркий день такого короткого немецкого лета, команда сосредоточилась на подготовке первой части большого манёвра на траектории, необходимого для встречи с кометой. Такой манёвр придаст космическому кораблю ускорение около 1,6 км/с, который следует выполнить в два почти одинаковых этапа: один до и один после долгого бездействия на дуговой траектории вокруг афелия. Первый этап, почти 800 м/с, необходимо разделить на несколько дней, в течение которых мы активируем малые бортовые двигатели малой тяги на несколько часов в течение периода контакта с землёй.
Конечно, мы немного нервничали: никогда ещё мы не подвергали Rosetta таким длительным периодам поджигания, и у нас был зазор всего лишь в пару недель на тот случай, если что-то пойдёт не так. Манёвр сближения должен быть выполнен вовремя, в противном случае мы никогда более не сможем добраться до кометы. 17 января мы провели первое запланированное большое поджигание продолжительностью около шести часов. Всё завершилось, как мы и планировали, но во время поджигания мы заметили неожиданные колебательные движения в пространственном положении космического корабля.
18 января, во время второго поджигания, колебательные движения неожиданно увеличились по абсолютной величине и перешагнули порог в два градуса, который спровоцировал бортовой безопасный режим космического аппарата, следовало прервать поджигание. У нас не было ни малейшего представления о том, что стало причиной подобного раскачивания в пространственном положении, при этом мы не располагали временем вдаваться в глубокие размышления.
Настало время, чтобы подготовить фазу продолжительного бездействия в глубоком космосе. Эта фаза всегда был нашим ночным кошмаром
Анализируя режим работы двигателей малой тяги, мы отметили, что распределение температур передних двигателей во время поджигания казалось номинальным, в то время как распределение температур задних двигателей показывало большие колебания. Таким образом, мы настроили пусковой реостат на задействование задних двигателей с таким же коэффициентом вне модуляции, что и у передних. Вместе с тем, хотя у нас и отсутствовали претензии к аппаратным средствам, в качестве меры предосторожности мы решили выполнить оставшиеся поджигания с использованием резервных двигателей малой тяги.
21 января мы попробовали применить поджигание средней продолжительности. Колебания всё ещё присутствовали, но значительно снизились, поэтому мы решили завершить манёвр в новой конфигурации. Все остальные поджигания прошли успешно (за исключением последнего, когда из-за командной ошибки был выбран другой безопасный режим, на нескольких часов испугав нас до чёртиков).
.jpg)
Снимки, полученные с камеры Osiris во время пролёта мимо астероида Штейнса
В начале февраля 2011 года Rosetta, наконец, заданным курсом последовал к комете. Мы не знаем, что стало причиной аномального поведения двигателей малой тяги, но мы нашли способ, который оказался достаточно хорош, чтобы завершить манёвр, и, возможно, будет также использован на втором этапе, запланированном на 2014 год, в случае, если к тому времени проблема останется нерешённой.
Пришло время подготовиться к продолжительному режиму бездействия в глубоком космосе. Эта фаза всегда была нашим кошмаром – мы должны были оставить наш космический корабль один на один и вне контакта с Землёй на 2,5 года – худшее, что когда-либо может себе вообразить руководитель космического полёта. Тем не менее у нас не было выбора. Большие расстояния от Солнца, которые мы проходили, не давали нам достаточно электроэнергии, чтобы справиться с возможными отказами и режимами восстановления. Мы были вынуждены отключить наш любимый космический аппарат.
Наступил день 8 июня 2011 года – день перехода в спящий режим. Мы набрали обороты нашему космическому кораблю, чтобы поддерживать его в гиростабилизированном пространственном положении; установили таймер, чтобы разбудить его 20 января 2014 года в 10:00 по Гринвичу; и после последней проверки соответствующей динамики вращения космического аппарата мы послали команду, чтобы выключить встроенный передатчик. Rosetta остался один в космическом пространстве, мы увидим его снова только черед два с половиной года, хотелось бы надеяться.
Автор материала:
.jpg)
Паоло Ферри (Paolo Ferri),
руководитель полётных операций,
Европейский центр
космических операций,
Дармштадт, Германия
Технический перевод статьи журнала ROOM
Оригинал статьи можно прочитать по этой ссылке
Rosetta - an eventful cruise phase
журнал ROOM №3 (9) 2016
.jpg)
 4738
4738