Космическая робототехника для монтажа и сервиса: потенциальные задачи, концепции перспективных систем
English
Space robotics for mounting and service: potential aims, concepts of advanced systems
Введение
Современный этап развития космической робототехники характеризуется наличием двух тенденций, в определенной степени противоречивых [1-26]. С одной стороны, основной опыт реальной эксплуатации накоплен, прежде всего, применительно к средствам космической робототехники, являющимся составной частью сложных многофункциональных пилотируемых систем. Таким образом, логика развития, очевидно, предполагает дальнейшее совершенствование элементов перспективной космической инфраструктуры, под которыми подразумеваются крупногабаритные многомодульные космические объекты, подобные орбитальным станциям. Поэтапный монтаж и последующая длительная эксплуатация таких объектов предполагают одновременное развитие средств робототехники - неотъемлемой составляющей этих объектов. Целью развития является постепенное уменьшение объема работ, выполняемых человеком в открытом космосе.
С другой стороны, в области перспективных проектов акцент все больше смещается на робототехническое сервисное обслуживание, трактуемое в широком смысле и подразумевающее также роботизированные монтажные операции применительно к весьма широкому классу объектов, в том числе не приспособленных изначально к такому обслуживанию. При этом предполагаемые автономные робототехнические средства, являясь существенно более сложными по сравнению с реально работающими на орбите устройствами, не только не имеют эксплуатируемых аналогов, но нацелены при этом на надежное решение весьма сложных комплексных задач. Наглядным примером может служить контактное взаимодействие автономного роботизированного сервисного модуля с вышедшим из строя космическим аппаратом, не имеющим систем, которые обеспечивают взаимное позиционирование при сближении и стыковке, совершающим произвольное неуправляемое движение и не оснащенным стыковочными узлами и специализированными захватными интерфейсами. Таким образом, практическая реализация подобных проектов предполагает не только конкретизацию концепций и уточнение задач, но также и прорывное развитие в области ключевых робототехнических технологий в космосе.
Перспективные задачи космической робототехники
Уникальность устройств космической робототехники предполагает на ранней стадии проектирования тщательный всесторонний анализ задач, для решения которых эти устройства предназначаются. Важной особенностью экстремальной робототехники вообще и космической робототехники в частности является принципиальная невозможность выполнения значительной части упомянутых задач человеком. При этом спектр декларируемых задач весьма широк. Например, в выделены следующие группы задач, решение которых подразумевает использование средств космической робототехники: стыковка, дозаправка на орбите, ремонт, модернизация, транспортировка, спасение, ликвидация космического мусора. В предложено выделять робототехническое обеспечение внутрикорабельной и внекорабельной деятельности на обитаемых орбитальных комплексах, роботизированные сборку и обслуживание орбитальной инфраструктуры в ближайшем космосе, робототехническое обеспечение доставки грузов и проведение работ на лунной орбите и поверхности Луны, автоматизированные исследования и создание напланетной инфраструктуры в пределах Солнечной системы, автоматизацию и роботизацию полетов и работ за пределами Солнечной системы. В [15, 16] перечислены следующие категории роботизированных сервисных операций орбитального обслуживания: устранение отказов, продление срока эксплуатации и прочие операции. К операциям устранения отказов отнесены: управление движением (корректировка орбиты – перемещение КА-клиента с неверного первоначального места доставки); развертывание (помощь в раскрытии солнечных батарей, антенн и других развертываемых элементов); ремонтно-восстановительные работы (ремонт или замена вышедших из строя компонентов). Продление срока эксплуатации КА предполагает выполнение следующих сервисных операций: управление движением (транспортировка – перенос КА-клиента на новую рабочую орбиту для экономии запасов топлива спутника); пополнение запасов расходных материалов, дозаправка (пополнение запасов топлива, охлаждающей жидкости и других расходных материалов); ремонтно-восстановительные работы (замена отработавших элементов); модернизация с целью расширения функциональности спутника и реконфигурация. К прочим отнесены следующие роботизированные операции: инспекция (дистанционная или контактная – осмотр КА-клиента с целью выявления неисправностей); управление движением (увод с орбиты (захоронение/затопление) – перемещение нерабочего КА-клиента и космического мусора с рабочей орбиты на орбиту захоронения или в атмосферу); сборочные операции (сборка ферменных конструкций, космических аппаратов и станций); разборка (извлечение функциональных блоков отработавших КА с целью замены элементов в неисправных КА). Особо следует выделить задачу создания роботов-помощников экипажа пилотируемых космических объектов [17-20].
Перечисленные задачи весьма различаются по виду требуемых робототехнических средств, режимам их работы, степени их автономности, уровню детерминированности среды функционирования и приспособленности объектов для роботизированного обслуживания, наличию технического и технологического задела, степени реализуемости проектов в целом в зависимости от наличия соответствующих роботизированных средств. Применительно к масштабным задачам на долговременную перспективу важно также подчеркнуть очевидную необходимость уточнения требований к ориентированным на решение этих задач робототехническим устройствам в процессе их проектирования и экспериментальной отработки.
Концепции перспективных робототехнических систем
В [1-3] отмечена важность подхода к разработке перспективных устройств космической робототехники, основанного на стремлении к минимизации доработок при совершенствовании отлаженных прототипов в направлении расширения функциональности. Эффективность данного подхода подтверждается историей успешного развития существующих на сегодняшний день средств космической робототехники. Манипулятор Canadarm (рис. 1) послужил прототипом манипулятора Canadarm-2, составляющего основу мобильной системы обслуживания, успешно эксплуатируемой сегодня в составе МКС (рис. 2). При этом важным расширением функциональности стала возможность перемещения манипулятора относительно станции как посредством «перешагивания» по базовым узлам, так и с помощью мобильного транспортера. Естественным дальнейшим развитием видится размещение манипулятора на подвижном относительно обслуживаемого объекта основании.
.jpg)
Рис. 1. Захват расположенного в грузовом отсеке шаттла Discovery телескопа «Хаббл» (Hubble Space Telescope) в процессе выведения его на орбиту в апреле 1990 года (фото NASA)
.jpg)
Рис. 2. Мобильная сервисная система МКС (по материалам NASA). Предусмотрена возможность перемещения основания манипулятора относительно станции
.jpg)
Рис. 3. Японский экспериментальный модуль МКС, оснащенный манипуляционной системой Japanese Experiment Module Remote Manipulator System (JEMRMS)
Таким образом, как отмечено в [1-3], вполне логичной выглядит концепция монтажно-сервисных автономных роботизированных космических модулей, осуществляющих захват фрагментов собираемой конструкции, доставляющих их к месту сборки и устанавливающих в штатное положение при помощи манипулятора.
Проблемам разработки, создания и эксплуатации таких модулей посвящено множество публикаций [26–33]. Устройства, называемые «свободнолетающие космические манипуляционные роботы» [31–33] либо «свободнолетающие космические роботизированные модули» [27–29], как отмечается в [30, 31], относятся к новому классу маломерных объектов космической техники. Они предназначены для выполнения различных работ в открытом космосе, в том числе для сборки больших космических конструкций различного назначения, а также для технического обслуживания внешних устройств пилотируемых орбитальных станций и других функционирующих на орбите объектов. Как отмечается в , основные идеи и принципы проектирования свободнолетающих манипуляционных роботов были сравнительно давно сформулированы, теоретически развиты и частично реализованы. Вместе с тем отмечается многофункциональность и многорежимность подобных роботизированных модулей, отсутствие на сегодняшний день успешно эксплуатируемых прототипов и, как следствие, большое число недостаточно изученных задач.
На сегодняшний день отсутствует опыт решения реальных задач обслуживания космических объектов с помощью подобных устройств. Однако имеется важный опыт осуществления нескольких орбитальных экспериментов (демонстрационных миссий).
Эксперимент ETS-VII (рис. 4) был проведен в 1997-1999 гг.[1-3, 13, 34-36]. Как отмечается в , он считается первым демонстрационным полетом с целью верификации технологий автономного сближения и стыковки для роботизированного обслуживания в космосе. Отрабатывались операции сближения и стыковки как с применением стыковочной системы без использования установленного на базовом спутнике манипулятора, так и посредством захвата спутника-клиента манипулятором базового спутника. Проводились эксперименты по автономной замене блоков на спутнике-клиенте, орбитальной сборке, развертыванию трансформируемых элементов. Отрабатывался режим телеуправления из наземного пункта. Экспериментально изучалась динамика управляемого движения свободнолетающей системы «базовый спутник – манипулятор – спутник-клиент», сочетающего перемещения подвижного основания манипулятора (базового спутника) с процессом манипулирования.
.jpg)
Рис. 4. Базовый сервисный спутник и субспутник-клиент для орбитального эксперимента ETS-VII по отработке технологий автономного роботизированного сервисного обслуживания, 1997 – 1999 гг.
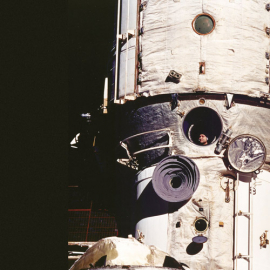
В 2007 г. был осуществлен аналогичный эксперимент Orbital Express [13, 37, 38]. С использованием сервисного спутника ASTRO и спутника-клиента NextSat (рис. 5) была выполнена экспериментальная отработка автономного сближения и стыковки, роботизированной замены блоков, дозаправки на орбите, операций по взаимному маневрированию для осуществления визуального осмотра спутника-клиента.

.jpg)
Рис. 5.1, 5.2. Эксперимент Orbital Express. Сервисный спутник ASTRO, оснащенный манипулятором, и спутник-клиент NextSat
Известен также ряд аналогичных проектов, не доведенных до стадии летного эксперимента. В качестве примера может быть приведена изложенная в [15, 16] концепция сервисного спутника, оснащенного средствами робототехнического обеспечения (СРТО), разработанная в ЦНИИ РТК. В составе СРТО выделяются базовый блок, манипуляционная система, обзорный блок, магазин сменного инструмента, отсек полезной нагрузки, стыковочное устройство. Для поддержания рабочего диапазона температур в условиях открытого космического пространства в составе СРТО предполагается наличие системы обеспечения теплового режима. Энергообеспечение и связь с наземным или орбитальным пультом управления предполагается реализовывать средствами сервисного спутника. С помощью сервисного спутника, имеющего в составе СРТО, предполагается выполнение сервисных операций, относящихся к перечисленным выше группам: устранение отказов, продление срока эксплуатации, прочие операции. На рис. 6 представлен проектный облик двух вариантов СРТО (с одним манипулятором и с тремя манипуляторами) в соответствии с [15, 16]. В частности, в [15, 16] отмечается, что операции орбитальной сборки посредством одного манипулятора могут быть реализованы по двум сценариям: сборка происходит непосредственно на целевом КА-клиенте (наращивание габаритов, установка дополнительных секций, развертывание солнечных батарей или антенн) либо сборка происходит посегментно на сервисном КА с последующей установкой готовых сегментов на КА-клиент.


Рис. 6.1, 6.2. Средства робототехнического обеспечения для использования в составе сервисного спутника разработки ЦНИИ РТК
Для дистанционной инспекции орбитальных космических станций может быть использовано специализированное автономное устройство – космический аппарат, осуществляющий видеофиксацию внешних поверхностей, предварительную обработку, сжатие и передачу информации по каналам связи на пульт управления.

Рис. 7. Робототехническая подсистема технического зрения, управления и связи разработки ФГУП ЦНИИмаш
Следует отметить, что после разрушения шаттла Columbia (миссия STS-107) для проведения инспекции использовалось не свободнолетающее устройство, а доработанный манипулятор Canadarm. В ходе каждой из последующих миссий Canadarm совместно с системой Orbiter Boom Sensor System (OBSS), содержащей размещаемые на удлинителе манипулятора инструменты, использовался для тщательного обследования внешней поверхности челнока с целью обнаружения возможных повреждений теплозащитного покрытия (рис. 8).

Рис. 8. Orbiter Boom Sensor System (OBSS), используемая совместно с Canadarm в ходе миссии STS-125, май 2009 г. (фото NASA)
Данный пример иллюстрирует важность последовательного развития технологий космической робототехники и актуальности тщательной экспериментальной орбитальной отработки новых устройств.
В [18, 19] описана транспортно-манипуляционная система для обслуживания космической станции и поддержки внекорабельной деятельности космонавтов (ЦНИИ РТК, ЦНИИмаш). Как отмечено в , разрабатываемая система по назначению, условиям эксплуатации и конструктивному исполнению аналогична эксплуатируемому на МКС роботу (манипулятору) Dextre (SPDM, рис. 2, рис. 10).

Рис. 9. Транспортно-манипуляционная система для обслуживания космической станции и поддержки внекорабельной деятельности космонавтов (ЦНИИ РТК, ЦНИИмаш). 1 – базовый блок; 2, 3 – манипуляторы.
.jpg)
Рис. 10. Манипулятор для специальных целей SPDM (Special Purpose Dexterous Manipulator) – Dextre (по материалам сайта )
Как отмечено в , одной из главных задач, решаемых на МКС при помощи робота Dextre, что функционирует в составе мобильной сервисной системы (рис. 2), является замена сменных блоков ORU (On-orbit Replaceable Unit, рис. 11).
.jpg)
Рис. 11. Операция по замене блока ORU при помощи SPDM
Не менее важным является использование MSS и манипулятора SPDM для отладки перспективных роботизированных технологий. Ярким примером может служить миссия Robotic Refueling Mission (RRM) [23, 24], конечная цель которой - создание сервисных спутников, обеспечивающих автоматизированную орбитальную дозаправку спутников-клиентов, в том числе не приспособленных изначально для сервисного обслуживания. Серия экспериментов по отладке соответствующих роботизированных технологий основывается на опыте миссий ETS-VII и Orbital Express, а также опыте орбитального обслуживания телескопа «Хаббл» (рис. 12) .

Рис. 12. Техническое обслуживание помещенного в грузовой отсек шаттла Hubble Space Telescope в ходе миссии STS-125, май 2009 г.
Для проведения эксперимента была выведена на орбиту и размещена на ферменной структуре МКС специальная платформа с размещенным на ней оборудованием и сменными инструментами для манипулятора SPDM (рис. 13).
.jpg)
Рис. 13. Орбитальный эксперимент Robotic Refueling Mission. Платформа с размещенным на ней оборудованием и инструментами, манипуляторы Dextre и Canadarm-2
В ходе эксперимента был успешно осуществлен ряд технологических операций, в частности демонтаж теплозащитных покрытий, резка фиксирующего защитную крышку провода, установка элементов роботизированной дозаправки, имитация перекачки топлива.
Одно из важных направлений развития космической робототехники – создание антропоморфных роботов-помощников экипажа обитаемых объектов. Антропоморфность - способ максимальной адаптации робота-помощника к функционированию в среде, рассчитанной на человека, а также средство обеспечения психологического комфорта членов экипажа.
В упоминается, что в качестве одного из возможных применений системы Robonaut 2 рассматривается дистанционное проведение находящимися на Земле специалистами операций в случае экстренной необходимости хирургического вмешательства для помощи членам экипажа.
Еще одним важным направлением развития медицинской робототехники в космосе в называется создание специальных тренажеров для поддержания у членов экипажа навыков оказания неотложной медицинской помощи.


Рис. 14.1, 14.2. Robonaut 2 на МКС
Весьма перспективна концепция реконфигурируемых робототехнических систем (рис. 15), предполагающих возможность изменения структуры в зависимости от особенностей задачи и также ориентированных на функционирование в среде, приспособленной для человека, не только внутри станции, но и на внешней ее поверхности [4, 8, 9, 15, 16, 19].

Рис. 15. Реконфигурируемая космическая робототехническая система
На рис. 16 приведены фрагменты демонстрационного ролика фирмы DARPA, посвященного программе Phoenix. Оснащенный манипуляторами сервисный спутник осуществляет сближение с обслуживаемым КА и выполняет ряд операций по его обслуживанию, в частности демонтаж рефлекторной антенны.






Рис. 16.1, 16.2, 16.3, 16.4, 16.5, 16.6. Программа Phoenix
В приведено описание программы Restore-L, основанной на опыте экспериментов Orbital Express и Robotic Refueling Mission. Предполагается обслуживание спутников-клиентов при помощи оснащенного манипуляторами сервисного спутника (рис. 16).

Рис. 17. Программа Restore-L
Таким образом, может быть сделан вывод о потенциальном конструктивном многообразии перспективных устройств космической робототехники, а также о весьма вероятной в ближайшей перспективе тенденции интенсивного развития упомянутых выше монтажно-сервисных автономных роботизированных модулей.
Наиболее общие элементы конструктивного облика таких модулей:
- наличие подвижного основания, обладающего достаточно высокой степенью автономности космического модуля, способного самостоятельно перемещаться в космическом пространстве и приспособленного для контактного взаимодействия с другими космическими объектами, например, базовыми станциями или монтируемыми (обслуживаемыми) объектами;
- наличие установленных на основании одного или нескольких манипуляторов, обеспечивающих возможность управляемого перемещения захваченного груза, в общем случае достаточно массивного относительно основания.
Например, в рассматривается концепция орбитальной сборки крупногабаритной космической конструкции при помощи гетерогенной группировки роботов (рис. 18), которые также могут быть отнесены к рассматриваемому классу монтажно-сервисных роботизированных модулей.

Рис. 18. Концепция орбитальной сборки крупногабаритной космической конструкции при помощи гетерогенной группировки роботов
Режимы функционирования монтажно-сервисного роботизированного космического модуля
Многорежимность, как отмечено в [1-3], является одним из важных характерных признаков рассматриваемого класса робототехнических систем – монтажно-сервисных автономных роботизированных космических модулей. Рассмотрим в качестве примера возможные способы причаливания такого модуля к некоторому объекту (монтируемой конструкции, обслуживаемому аппарату, базовой станции):
1. Непосредственная стыковка при помощи стыковочного устройства. Манипулятор не задействуется. Предполагается взаимное движение массивных стыкуемых объектов и наличие ненулевых относительных скоростей на момент касания.
2. Стыковка путем захвата манипулятором модуля базового узла объекта. Предполагается малая относительная скорость (линейная и угловая) массивных стыкуемых объектов. Взаимное положение стыкуемых объектов после завершения захвата манипулятором базового узла может рассматриваться как окончательное (объекты связаны посредством управляемого промежуточного механизма) либо как промежуточное, предполагающее дальнейшее взаимное позиционирование при помощи манипулятора.
3. Стыковка соединенных по схеме предыдущего пункта объектов при помощи манипулятора. В данном случае, в отличие от непосредственной стыковки, взаимное движение стыкуемых масс обеспечивается не системой управления движением и ориентацией активного объекта (в рассматриваемом случае роботизированного модуля), а управляемым взаимным позиционированием при помощи промежуточного механизма. Примером данной схемы стыковки может служить стыковка объектов к узлам CBM при помощи манипулятора на МКС.
В зависимости от функциональных возможностей конкретных автономных роботизированных космических модулей и комбинирования перечисленных выше способов стыковки могут быть сформированы различные стратегии осуществления монтажно-сервисных операций.
Предположим наличие следующих этапов роботизированного монтажа некоторой крупногабаритной космической конструкции из пассивных фрагментов:
1. Доставка фрагментов в некое промежуточное положение на орбите. Можно предположить доставку к специализированной базовой станции.
2. Приведение фрагментов в состояние готовности к монтажу – извлечение из транспортного отсека (с возможным изменением конфигурации).
3. Захват фрагментов автономным роботизированным космическим модулем.
4. Транспортировка фрагментов автономным роботизированным космическим модулем к месту сборки.
5. Присоединение доставленных фрагментов к монтируемой конструкции.
При этом ключевую роль играет степень оснащенности фрагментов захватными интерфейсами и стыковочными узлами.
Тогда могут быть выделены весьма различающиеся с точки зрения особенностей динамики управляемого движения режимы функционирования автономного роботизированного космического модуля, например:
- управляемое движение модуля без груза («порожний полет»);
- стыковка модуля к базовой станции или монтируемой конструкции без использования манипулятора;
- стыковка модуля к базовой станции или монтируемой конструкции с использованием манипулятора («захват» базовой станции манипулятором с возможной последующей пристыковкой модуля);
- захват манипулятором закрепленного относительно базовой станции модуля груза, также закрепленного относительно базовой станции;
- захват манипулятором свободного в инерциальном пространстве груза;
- управляемое движение модуля с грузом в схвате манипулятора;
- управляемое перемещение при помощи манипулятора груза относительно основания с последующим закреплением груза относительно основания («транспортная фиксация»);
- управляемое движение модуля с грузом, закрепленным на основании;
- пристыковка модуля с грузом к монтируемой конструкции с последующим отсоединением груза от основания при помощи манипулятора и установкой на штатное место;
- пристыковка груза в режиме, когда система «подвижное основание – манипулятор – груз» свободно перемещается относительно монтируемой конструкции (под действием усилий, прикладываемых со стороны системы управления движением и положением основания, или под действием усилий приводов степеней подвижности манипулятора) таким образом, чтобы в момент контакта фрагмента с конструкцией были обеспечены требуемые начальные условия стыковки.
В качестве примера сочетания возможных режимов функционирования монтажно-сервисного роботизированного космического модуля может быть приведена описанная в процедура захвата спутника-цели (обслуживаемого КА) сервисным спутником (рис. 19).

Рис. 19. Захват спутника-цели сервисным спутником
В выделены четыре фазы: предварительный анализ кинематических параметров движения спутника-цели; сближение; захват; совместное движение системы «сервисный спутник – манипулятор – обслуживаемый КА».
Выводы
1. Введение в полномасштабную эксплуатацию устройств космической робототехники предполагает комплексное орбитальное тестирование. При этом достаточно эффективным является подход, при котором экспериментальная отработка новых функций робототехнического устройства осуществляется одновременно с его орбитальной эксплуатацией, использующей некоторую отлаженную базовую функциональность. Наиболее наглядным примером такого подхода является роботизированная мобильная сервисная система Международной космической станции.
2. Реализация данного подхода предполагает наличие в качестве некоторого «орбитального робототехнического полигона» крупногабаритного многомодульного космического объекта комплексного целевого назначения, создаваемого и эксплуатируемого в течение достаточно длительного времени в соответствии с заранее отработанной стратегией. Очевидным и единственным на сегодняшний день примером подобного объекта является Международная космическая станция. При этом следует подчеркнуть, что данный объект является пилотируемым, а входящие в его состав средства космической робототехники при их использовании для решения реальных задач управляются преимущественно квалифицированным оператором, находящимся на борту.
3. Одиночные кратковременные демонстрационные миссии по экспериментальной отработке новых робототехнических средств и роботизированных технологий, подобные ETS-VII и Orbital Express, на сегодняшний день являются дополнением упомянутого выше основного подхода. По-видимому, они не могут в обозримом будущем рассматриваться в качестве самодостаточного средства отладки перспективных робототехнических средств, по крайней мере, тех, уровень сложности которых предполагает решение декларируемых на современном этапе перспективных задач.
4. Наиболее логичным выглядит дальнейшее эволюционное расширение функциональности существующих на сегодняшний день средств космической робототехники в направлениях, диктуемых потребностями сформулированных перспективных задач, последовательно реализуемое в рамках масштабного долговременного проекта. Примером такого проекта могло бы служить создание крупногабаритного модульного необитаемого (эпизодически посещаемого) космического объекта, монтаж и сервисное обслуживание которого осуществлялось бы являющимися его неотъемлемой частью автономными средствами робототехники. В дальнейшем целесообразно предположить создание взаимосвязанной совокупности таких объектов и возможность автономного перемещения между ними монтажно-сервисных средств космической робототехники.
5. Анализ требующих роботизации перспективных задач и поиск путей их решения целесообразно проводить с учетом необходимости технологической преемственности при создании новых средств космической робототехники и подтвержденной опытом эффективности долговременной стратегии при отработке соответствующих технологий.
Литература
1. Белоножко П.П. Космическая робототехника. Опыт и перспективы развития // Воздушно-космическая сфера. 2018. № 1. С. 84-93.
2. Белоножко П.П. Космическая робототехника. Современное состояние, перспективные задачи, тенденции развития. Аналитический обзор // Наука и образование (МГТУ им. Н.Э. Баумана). Электрон. журн. 2016. № 12. С. 110-153. DOI: 10.7463/1216.0853919
3. Белоножко П.П. Перспективные монтажно-сервисные роботизированные космические модули // Робототехника и техническая кибернетика. 2015. № 2. С. 18-23.
4. Градовцев А.А., Кондратьев А.С., Тимофеев А.Н. Робототехническое обеспечение для объектов перспективной космической инфраструктуры // Международная научно-техническая конференция «Экстремальная робототехника» (23–25 ноября 2011 г., ГНУ ЦНИИ РТК, Санкт-Петербург) [Электронный ресурс]. URL: http://er.rtc.ru/old/docs/2011-ER_PlenarDoclad.pdf (Дата обращения: 06.03.2018).
5. Вовк А.В., Легостаев В.П., Лопота В.А. Перспективные концепции и технологии создания космической техники на базе мехатроники и микросистемной техники // Известия Академии наук. Энергетика. 2011. № 3. С. 3-11.
6. Управление подвижными объектами. Библиографический указатель. В 3 выпусках. Вып.1. Космические объекты / Учреждение Российской академии наук Институт проблем управления им. В. А. Трапезникова РАН. М., 2011. 268 с.
7. H. A. Thronson, D. Akin, J. Lester. The Evolution and Primise of Robotic In-Space Servising // AIAA SPACE 2009 Conference&Exposition (14-17 September 2009, Pasadena, California). AIAA 2009-6545. Available at: http://www.enu.kz/repository/2009/AIAA-2009-6545.pdf (Дата обращения: 27.02.2018).
8. Лопота В.А., Юревич Е.И. О некоторых перспективных направлениях развития космической робототехники [Электронный ресурс] // РКК «Энергия» им. С. П. Королёва. URL: https://www.energia.ru/ru/news/news-2011/public_07-21_2.pdf (Дата обращения: 06.03.2018).
9. Лопота А.В., Юревич Е.И. Этапы и перспективы развития модульного принципа построения робототехнических систем // Научно-технические ведомости СПбГПУ. 2013. № 1. С. 98-103.
10. E. Kaupp, E. Bains, R. Flores, G. Jorgensen, Y.M. Kuo, H. White. Shuttle Robotic Arm // Engineering Innovations. Pp. 286-301. Available at: http://www.nasa.gov/centers/johnson/pdf/584734main_Wings-ch4h-pgs286-301.pdf (Дата обращения: 09.11.2018).
11. B. Stockman, J. Boyle, J. Bacon. International Space Station Systems Engineering Case Study Available at: http://spacese.spacegrant.org/uploads/images/ISS/ISS%20SE%20Case%20Study.pdf (Дата обращения: 09.11.2018).
12. C. Ower, L. Poynter, A. Keenan. The role of dexterous robotics in ongoing maintenance of the ISS. 63rd International Astronautical Congress 2012 ( IAC 2012), Naples, Italy, 1-5 October 2012, Volume 5 of 14: IAC-12.B3.4-B6.5.6.
13. Angel Flores-Abad, Ou Ma, Khanh Pham, Steve Ulrich. A review of space robotics technologies for on-orbit servicing. Progress in Aerospace Sciences, 2014, vol. 68, pp. 1-26. DOI: 10.1016/j.paerosci.2014.03.002
14. Лысый С.Р. Научно-технические проблемы и перспективы развития робототехники специального (космического) назначения // Экстремальная робототехника. Труды международной научно-технической конференции. СПб.: Политехника-сервис, 2015. С. 29-32.
15. Даляев И.Ю., Шардыко И.В., Кузнецова Е.М. Технический облик средств робототехнического обеспечения сервисного спутника, предназначенного для продления сроков активного существования космических аппаратов // Экстремальная робототехника. Труды международной научно-технической конференции. СПб.: Политехника-сервис, 2015. С. 181-186.
16. Даляев И.Ю., Шардыко И.В., Кузнецова Е.М. Перспектива создания роботизированных сервисных спутников для технического обслуживания и продления сроков активного существования космических аппаратов // Робототехника и техническая кибернетика. 2015. №3. С. 27-31.
17. Лончаков Ю.В., Сиволап В.А., Сохин И.Г. Эргономические проблемы создания и применения антропоморфных роботов-помощников экипажей перспективных космических миссий // Экстремальная робототехника. Труды международной научно-технической конференции. СПб.: Политехника-сервис, 2015. С. 195-199.
18. Середин С.В., Лысый С.Р., Семенов В.В., Абалихин О.Ю., Емельдящева О.В., Фомина В.В., Кондратьев А.С., Градовцев А.А., Конышев В.А. Космические робототехнические системы поддержки деятельности экипажа орбитальных и напланетных модулей // Экстремальная робототехника Труды международной научно-технической конференции. СПб.: Политехника-сервис, 2015. С. 199 -202.
19. Лопота В.А., Потапов А.М., Градовцев А.А., Каргов А.И., Даляев И.Ю. Транспортно-манипуляционная система для обслуживания Международной космической станции и поддержки внекорабельной деятельности космонавтов // Мехатроника, автоматизация, управление. 2011. №2. С. 6-16.
20. NASA // NASA: official website. Available at: http://www.nasa.gov/ (Дата обращения: 09.11.2018).
21. CSA // CSA: official website. Available at: http://www.asc-csa.gc.ca/eng/default.asp (Дата обращения: 09.11.2018).
22. Buran.ru [Электронный ресурс]. URL: http://www.buran.ru (Дата обращения: 09.11.2018).
23. NASA's Robotic Refueling Mission Practices New Satellite-Servicing Tasks [Электронный ресурс] // NASA. URL: http://www.nasa.gov/mission_pages/station/research/news/rrm_practice.html (Дата обращения: 05.11.2018).
24. Robotic refueling mission (RRM) [Электронный ресурс]. URL: https://sspd.gsfc.nasa.gov/robotic_refueling_mission.html (Дата обращения: 04.11.2018).
25. Градовцев А.А., Даляев И.Ю. Космический эксперимент «Захват-Э» // Пилотируемые полеты в космос. Материалы XI Международной научно-практической конференции (10–12 ноября 2015 г., Звездный городок). Звездный городок, 2015. С. 180-182.
26. Moosavian S. Ali A., Papadopoulos E. Free-flying robots in space: an overview of dynamics modeling, planning and control // Robotica, 2007, vol. 25, pp. 537-547. DOI: 10.1017/S0263574707003438
27. Богомолов В.П., Рутковский В.Ю., Суханов В.М. Проектирование оптимальной механической структуры свободнолетающего космического робототехнического модуля как объекта автоматического управления. I // Автоматика и телемеханика, 1998. Вып. 5. С. 27-40.
28. Глумов В.М., Рутковский В.Ю., Суханов В.М. Анализ особенностей управления перелетами космического роботизированного модуля вблизи поверхности орбитальной станции. I. Управление ориентацией модуля // Известия Академии наук. Теория и системы управления. 2002. № 2. С. 162-169.
29. Глумов В.М., Рутковский В.Ю., Суханов В.М. Анализ особенностей управления перелетами космического роботизированного модуля вблизи поверхности орбитальной станции. II. Управление траекторными перемещениями модуля // Известия Академии наук. Теория и системы управления. 2002. № 3. С. 140-148.
30. Рутковский В.Ю., Суханов В.М., Глумов В.М. Управление многорежимным космическим роботом при выполнении манипуляционных операций во внешней среде // Автоматика и телемеханика. 2010. Вып. 11. С. 96-111.
31. Рутковский В.Ю., Суханов В.М., Глумов В.М. Уравнения движения и управление свободнолетающим космическим манипуляционным роботом в режиме реконфигурации // Автоматика и телемеханика. 2010. Вып. 1. С. 80-98.
32. Рутковский В.Ю., Суханов В.М., Глумов В.М. Некоторые задачи управления свободнолетающими космическими манипуляционными роботами. I // Мехатроника, автоматизация, управление. 2010. №10. С. 52-59.
33. Рутковский В.Ю., Суханов В.М., Глумов В.М. Некоторые задачи управления свободнолетающими космическими манипуляционными роботами. II // Мехатроника, автоматизация, управление. 2010. № 12. С. 54-65.
34. K. Yoshida (2000). Space Robot Dynamics and Control: To Orbit, From Orbit, and Future. In: Hollerbach J.M., Koditschek D.E. (eds). Robotics Research. Springer, London, pp. 449-456.
35. K. Yoshida (2000). Space Robot Dynamics and Control: a Historical Perspective. Journal of Robotics and Mechatronics, vol. 12, no. 4, pp. 402-410.
36. K. Yoshida and K. Hashizume (2001). Zero Reaction Maneuver: Flight Velication with ETS-VII Space Robot and Extention to Kinematically Redundant Arm. Proceedings of the 2001 IEEE International Conference on Robotics and Automation, ICRA 2001, May 21-26, 2001, Seoul, Korea.
37. Mulder T. A. Orbital express autonomous rendezvous and capture flight operations. AIAA/AAS Astrodynamics. Specialist Conference and Exhibit, Honolulu, HI, 2008, AIAA paper 2008-6768, pp. 1-22, DOI: 10.2514/6.2008-6768
38. Robert B. Friend. Orbital Express program summary and mission overview, Proc. SPIE 6958, Sensors and Systems for Space Applications II, 695803 (15 April 2008); DOI: 10.1117/12.783792
39. Ушаков И.Б. , Поляков А.В., Карпов А.А., Усов В.М. Медицинская робототехника как новый этап развития бортовых тренажеров и биотехнических систем на орбитальной станции // Экстремальная робототехника. Труды международной научно-технической конференции. СПб.: Политехника-сервис, 2015. С. 47-52.
40. Богачева Р.А., Зонов А.А., Конышев В.А. Перспективы использования социальных роботов для психологической и информационной поддержки космонавтов в длительных космических полетах // Экстремальная робототехника. Труды международной научно-технической конференции. СПб.: Политехника-сервис, 2015. С. 55-59.
41. R2 Robonaut [Электронный ресурс]. URL: https://robonaut.jsc.nasa.gov/R2 (Дата обращения: 12.11.2018).
42. Dubowsky S., Boning P. Coordinated Control of Space Robot Teams for the On-Orbit Construction of Large Flexible Space Structures, Advanced Robotics, vol. 24, iss. 3, pp. 303-323, DOI: 10.1163/016918609X12619993300665
References
1. Belonozhko P.P. Kosmicheskaya robototekhnika. Opyt i perspektivy razvitiya. Vozdushno-kosmicheskaya sfera, 2018, no. 1, pp. 84-93.
2. Belonozhko P.P. Kosmicheskaya robototekhnika. Sovremennoe sostoyanie, perspektivnye zadachi, tendentsii razvitiya. Analiticheskiy obzor. Science and Education of Bauman MSTU, 2016, no. 12, pp. 110-153. DOI: 10.7463/1216.0853919
3. Belonozhko P.P. Perspektivnye montazhno-servisnye robotizirovannye kosmicheskie moduli. Robototekhnika i tekhnicheskaya kibernetika, 2015, no. 2, pp. 18-23.
4. Gradovtsev A.A., Kondrat'ev A.S., Timofeev A.N. Robototekhnicheskoe obespechenie dlya ob"ektov perspektivnoi kosmicheskoi infrastruktury Mezhdunarodnaya nauchno-tekhnicheskaya konferentsiya «Ehkstremal'naya robototekhnika», 23–25 November, the Central Research and Experimental Design Institute for Robotics and Engineering Cybernetics, Saint Petersburg, 2011, available at: http://er.rtc.ru/old/docs/2011-ER_PlenarDoclad.pdf (Retrieval date: 06.03.2018).
5. Vovk A.V., Legostaev V.P., Lopota V.A. Perspektivnye kontseptsii i tekhnologii sozdaniya kosmicheskoy tekhniki na baze mekhatroniki i mikrosistemnoy tekhniki. Izvestiya Akademii nauk. Energetika, 2011, no. 3, pp. 3-11.
6. Upravlenie podvizhnymi ob"ektami. Bibliograficheskij ukazatel'. Vol. 1. Kosmicheskie ob"ekty. Мoscow, Institut problem upravleniya im. V.A. Trapeznikova of the Russian Academy of Sciences, 2011, 268 p.
7. H. A. Thronson, D. Akin, J. Lester. The Evolution and Primise of Robotic In-Space Servising // AIAA SPACE 2009 Conference&Exposition (14-17 September 2009, Pasadena, California). AIAA 2009-6545. Available at: http://www.enu.kz/repository/2009/AIAA-2009-6545.pdf (Retrieval date: 27.02.2018).
8. Lopota V.A., Yurevich E.I. O nekotorykh perspektivnykh napravleniyakh razvitiya kosmicheskoi robototekhniki. S.P.Korolev RSC Energia. available at: https://www.energia.ru/ru/news/news-2011/public_07-21_2.pdf (Retrieval date: 25.02.2018).
9. Lopota A.V., Yurevich E.I. Ehtapy i perspektivy razvitiya modul'nogo principa postroeniya robototekhnicheskih system. Nauchno-tekhnicheskie vedomosti Saint Petersburg state polytechnical university, 2013, no. 1, pp. 98-103.
10. E. Kaupp, E. Bains, R. Flores, G. Jorgensen, Y.M. Kuo, H. White. Shuttle Robotic Arm // Engineering Innovations. Pp. 286-301. Available at: http://www.nasa.gov/centers/johnson/pdf/584734main_Wings-ch4h-pgs286-301.pdf (Retrieval date: 09.11.2018).
11. B. Stockman, J. Boyle, J. Bacon. International Space Station Systems Engineering Case Study Available at: http://spacese.spacegrant.org/uploads/images/ISS/ISS%20SE%20Case%20Study.pdf (Retrieval date: 09.11.2018).
12. C. Ower, L. Poynter, A. Keenan. The role of dexterous robotics in ongoing maintenance of the ISS. 63rd International Astronautical Congress 2012 ( IAC 2012), Naples, Italy, 1-5 October 2012, Volume 5 of 14: IAC-12.B3.4-B6.5.6.
13. Angel Flores-Abad, Ou Ma, Khanh Pham, Steve Ulrich. A review of space robotics technologies for on-orbit servicing. Progress in Aerospace Sciences, 2014, vol. 68, pp. 1-26. DOI: 10.1016/j.paerosci.2014.03.002
14. Lysyj S.R. Nauchno-tekhnicheskie problemy i perspektivy razvitiya robototekhniki special'nogo (kosmicheskogo) naznacheniya. Ehkstremal'naya robototekhnika. Proceedings of the International Scientific and Technical Conference. Saint Petersburg: Politekhnika-servis, 2015, pp. 29-32.
15. Dalyaev I.Yu., Shardyko I.V., Kuznetsova E.M. Tekhnicheskiy oblik sredstv robototekhnicheskogo obespecheniya servisnogo sputnika, prednaznachennogo dlya prodleniya srokov aktivnogo sushchestvovaniya kosmicheskikh apparatov. Ehkstremal'naya robototekhnika. Proceedings of the International Scientific and Technical Conference. Saint Petersburg: Politekhnika-servis, 2015, pp. 181-186.
16. Dalyayev I.Yu., Shardyko I.V., Kuznetsova E.M. Perspektiva sozdaniya robotizirovannykh servisnykh sputnikov dlya tekhnicheskogo obsluzhivaniya i prodleniya srokov aktivnogo sushchestvovaniya kosmicheskikh apparatov. Robototekhnika i tekhnicheskaya kibernetika, 2015, no. 3. pp. 27-31.
17. Lonchakov Yu.V., Sivolap V.A., Sokhin I.G. Ergonomicheskie problemy sozdaniya i primeneniya antropomorfnykh robotov-pomoshchnikov ekipazhey perspektivnykh kosmicheskikh missiy. Ehkstremal'naya robototekhnika. Proceedings of the International Scientific and Technical Conference. Saint Petersburg: Politekhnika-servis, 2015, pp. 195-199.
18. Seredin S.V., Lysyy S.R., Semenov V.V., Abalikhin O.Yu., Emel'dyashcheva O.V., Fomina V.V., Kondrat'ev A.S., Gradovtsev A.A., Konyshev V.A. Kosmicheskie robototekhnicheskie sistemy podderzhki deyatel'nosti ekipazha orbital'nykh i naplanetnykh moduley. Ehkstremal'naya robototekhnika. Proceedings of the International Scientific and Technical Conference. Saint Petersburg: Politekhnika-servis, 2015, pp. 199-202.
19. Lopota V.A., Potapov A.M., Gradovtsev A.A., Kargov A.I., Dalyaev I.Yu. Transportno-manipulyatsionnaya sistema dlya obsluzhivaniya Mezhdunarodnoy kosmicheskoy stantsii i podderzhki vnekorabel'noy deyatel'nosti kosmonavtov. Mekhatronika, avtomatizatsiya, upravlenie, 2011, no. 2, pp. 6-16.
20. NASA // NASA: official website. Available at: http://www.nasa.gov/ (Retrieval date: 09.11.2018).
21. CSA // CSA: official website. Available at: http://www.asc-csa.gc.ca/eng/default.asp (Retrieval date: 09.11.2018).
22. Buran.ru. Available at: http://www.buran.ru (Retrieval date: 09.11.2018).
23. NASA's Robotic Refueling Mission Practices New Satellite-Servicing Tasks // NASA. Available at: http://www.nasa.gov/mission_pages/station/research/news/rrm_practice.html (Retrieval date: 05.11.2018).
24. Robotic refueling mission (RRM). Available at: https://sspd.gsfc.nasa.gov/robotic_refueling_mission.html (Retrieval date: 04.11.2018).
25. Gradovtsev A.A., Dalyaev I.Yu. Kosmicheskiy eksperiment "Zakhvat-E" // Pilotiruemye polety v kosmos. Proceedings of the XI International Scientific and Practical Conference (10–12 noyabrya 2015 g., Zvezdnyy gorodok). Zvezdnyy gorodok, 2015, pp. 180-182.
26. Moosavian S. Ali A., Papadopoulos E. Free-flying robots in space: an overview of dynamics modeling, planning and control. Robotica, 2007, vol. 25, pp. 537-547. DOI: 10.1017/S0263574707003438
27. Bogomolov V.P., Rutkovskiy V.Yu., Sukhanov V.M. Proektirovanie optimal'noy mekhanicheskoy struktury svobodnoletayushchego kosmicheskogo robototekhnicheskogo modulya kak ob"ekta avtomaticheskogo upravleniya. I. Avtomatika i telemekhanika, 1998, iss. 5, pp. 27-40.
28. Glumov V.M., Rutkovskiy V.Yu., Sukhanov V.M. Analiz osobennostey upravleniya pereletami kosmicheskogo robotizirovannogo modulya vblizi poverkhnosti orbital'noy stantsii. I. Upravlenie orientatsiey modulya. Izvestiya Akademii nauk. Teoriya i sistemy upravleniya, 2002, no. 2, pp. 162-169.
29. Glumov V.M., Rutkovskiy V.Yu., Sukhanov V.M. Analiz osobennostey upravleniya pereletami kosmicheskogo robotizirovannogo modulya vblizi poverkhnosti orbital'noy stantsii. II. Upravlenie traektornymi peremeshcheniyami modulya. Izvestiya Akademii nauk. Teoriya i sistemy upravleniya, 2002, no. 3, pp. 140-148.
30. Rutkovskiy V.Yu., Sukhanov V.M., Glumov V.M. Upravlenie mnogorezhimnym kosmicheskim robotom pri vypolnenii manipulyatsionnykh operatsiy vo vneshney srede. Avtomatika i telemekhanika, 2010, iss. 11, pp. 96-111.
31. Rutkovskiy V.Yu., Sukhanov V.M., Glumov V.M. Uravneniya dvizheniya i upravlenie svobodnoletayushchim kosmicheskim manipulyatsionnym robotom v rezhime rekonfiguratsii. Avtomatika i telemekhanika, 2010, iss. 1, pp. 80-98.
32. Rutkovskiy V.Yu., Sukhanov V.M., Glumov V.M. Nekotorye zadachi upravleniya svobodnoletayushchimi kosmicheskimi manipulyatsionnymi robotami. I. Mekhatronika, avtomatizatsiya, upravlenie, 2010, no. 10, pp. 52-59.
33. Rutkovskiy V.Yu., Sukhanov V.M., Glumov V.M. Nekotorye zadachi upravleniya svobodnoletayushchimi kosmicheskimi manipulyatsionnymi robotami. II. Mekhatronika, avtomatizatsiya, upravlenie, 2010, no. 12, pp. 54–65.
34. K. Yoshida (2000). Space Robot Dynamics and Control: To Orbit, From Orbit, and Future. In: Hollerbach J.M., Koditschek D.E. (eds). Robotics Research. Springer, London, pp. 449-456.
35. K. Yoshida (2000). Space Robot Dynamics and Control: a Historical Perspective. Journal of Robotics and Mechatronics, vol. 12, no. 4, pp. 402-410.
36. K. Yoshida and K. Hashizume (2001). Zero Reaction Maneuver: Flight Velication with ETS-VII Space Robot and Extention to Kinematically Redundant Arm. Proceedings of the 2001 IEEE International Conference on Robotics and Automation, ICRA 2001, May 21-26, 2001, Seoul, Korea.
37. Mulder T. A. Orbital express autonomous rendezvous and capture flight operations. AIAA/AAS Astrodynamics. Specialist Conference and Exhibit, Honolulu, HI, 2008, AIAA paper 2008-6768, pp. 1-22, DOI: 10.2514/6.2008-6768
38. Robert B. Friend. Orbital Express program summary and mission overview, Proc. SPIE 6958, Sensors and Systems for Space Applications II, 695803 (15 April 2008); DOI: 10.1117/12.783792
39. Ushakov I.B. , Polyakov A.V., Karpov A.A., Usov V.M. Meditsinskaya robototekhnika kak novyy etap razvitiya bortovykh trenazherov i biotekhnicheskikh sistem na orbital'noy stantsii. Ehkstremal'naya robototekhnika. Proceedings of the International Scientific and Technical Conference. Saint Petersburg: Politekhnika-servis, 2015, pp. 47-52.
40. Bogacheva R.A., Zonov A.A., Konyshev V.A. Perspektivy ispol'zovaniya sotsial'nykh robotov dlya psikhologicheskoy i informatsionnoy podderzhki kosmonavtov v dlitel'nykh kosmicheskikh poletakh. Ehkstremal'naya robototekhnika. Proceedings of the International Scientific and Technical Conference. Saint Petersburg: Politekhnika-servis, 2015, pp. 55-59.
41. R2 Robonaut. Available at: https://robonaut.jsc.nasa.gov/R2 (Retrieval date: 12.11.2018).
42. Dubowsky S., Boning P. Coordinated Control of Space Robot Teams for the On-Orbit Construction of Large Flexible Space Structures, Advanced Robotics, vol. 24, iss. 3, pp. 303-323, DOI: 10.1163/016918609X12619993300665
© Белоножко П. П., 2018
История статьи:
Поступила в редакцию: 12.11.2018
Принята к публикации: 24.11.2018
Модератор: Дмитрюк С. В.
Конфликт интересов: отсутствует
Для цитирования:
Белоножко П. П. Космическая робототехника для монтажа и сервиса. Потенциальные задачи, концепции перспективных систем // Воздушно-космическая сфера. 2018. №4. С. 84-97.
 4742
4742